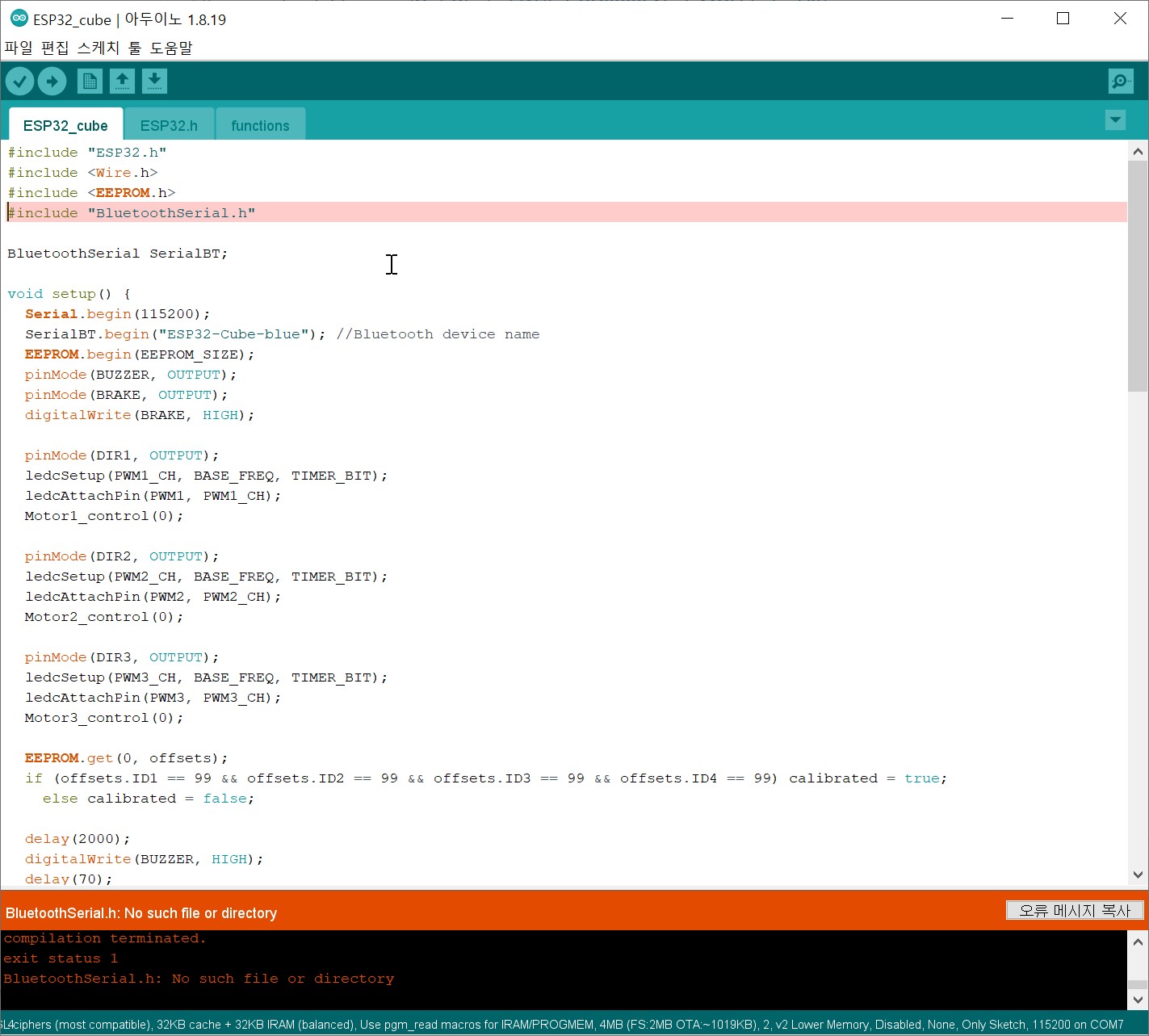
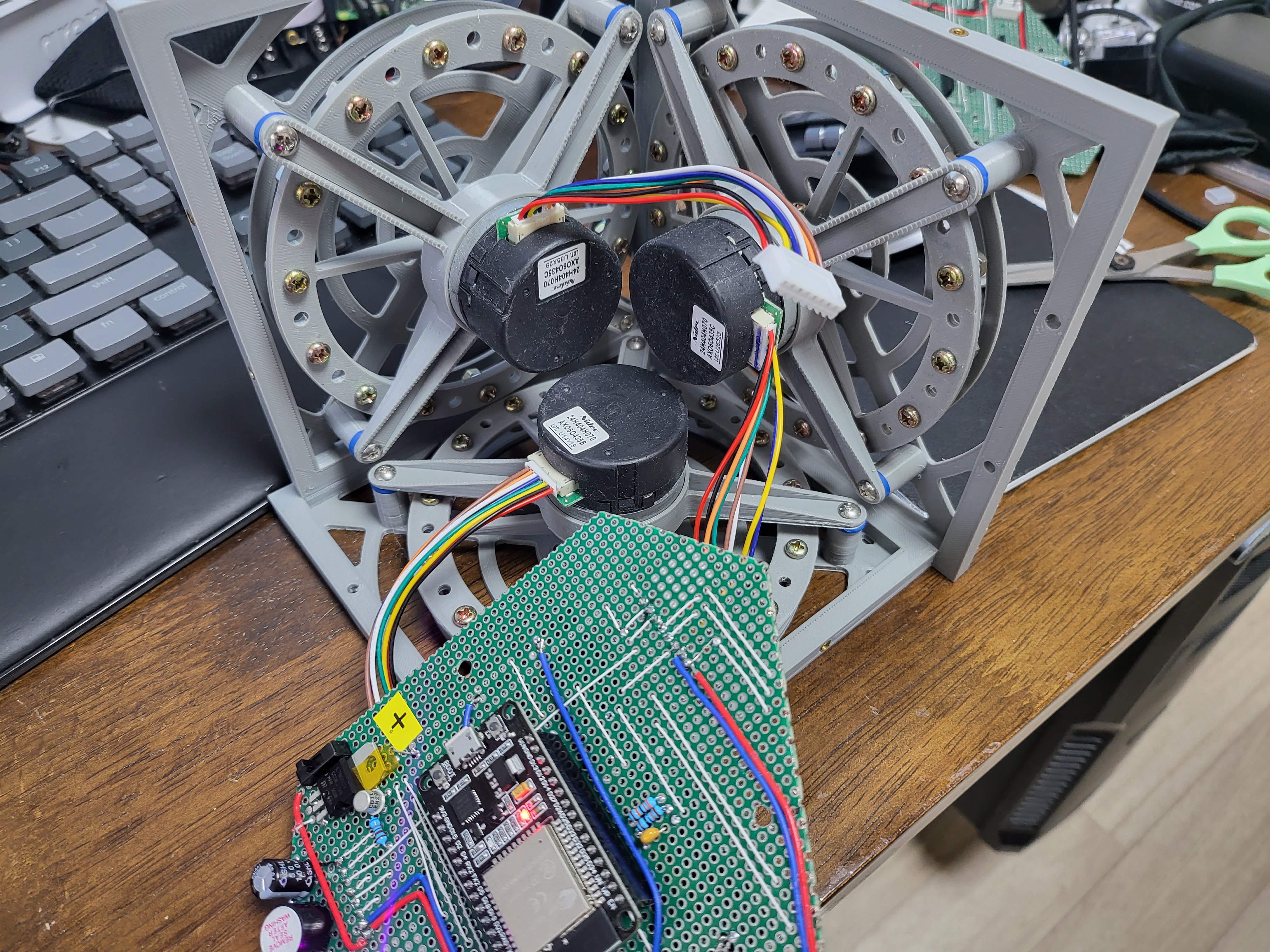
튜닝만 하면 마무리되는 물건이지만, 메이커페어에 들고나갈 생각을 하니 좀 더 손보고 싶어지더군요
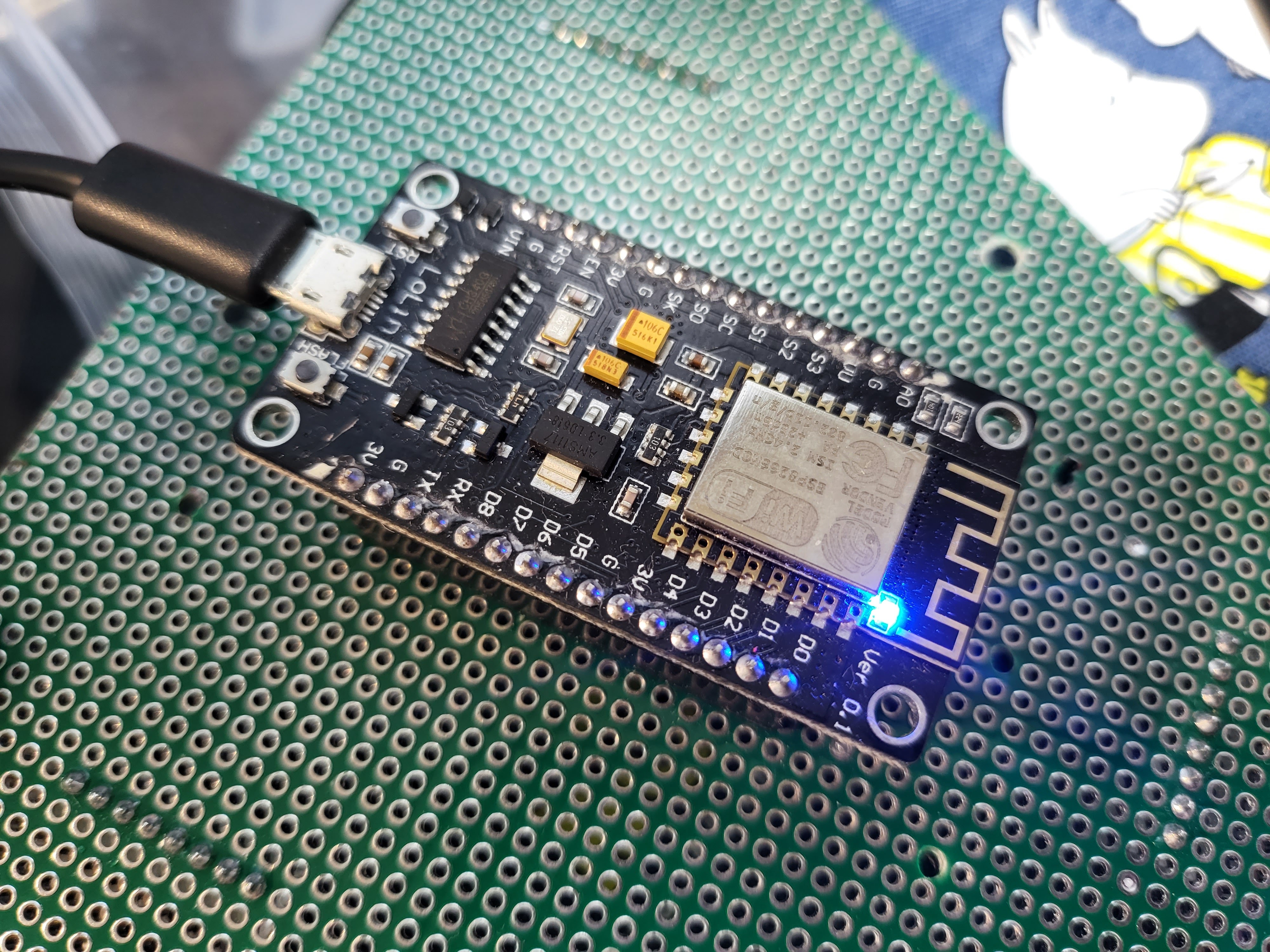
달려있던 모터 하나가 축이 휘어져서 밸런스 돌릴때마다 이상하게 비틀거리기도 했고 자이로 휠도 바꾸고 싶어져서
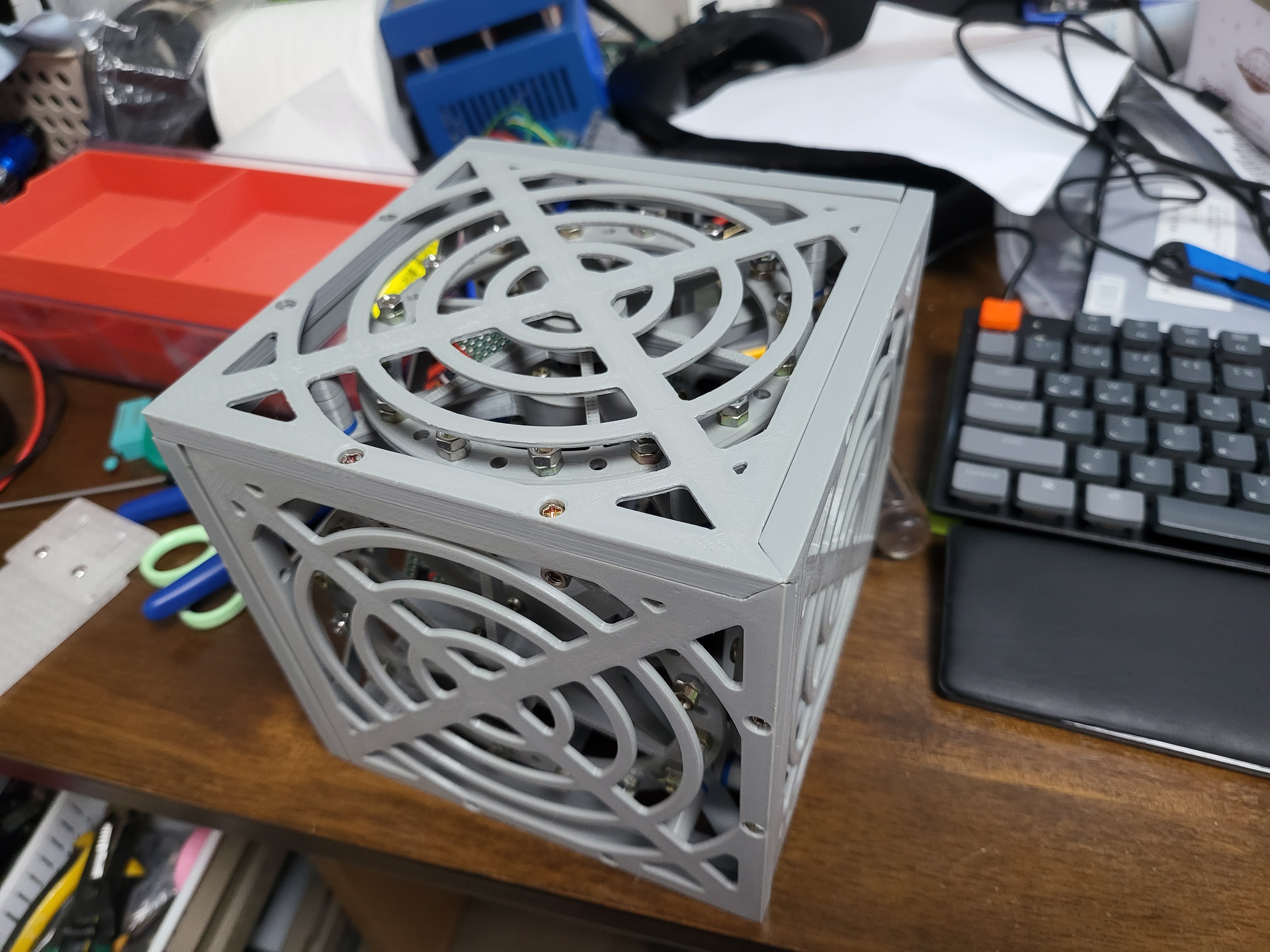
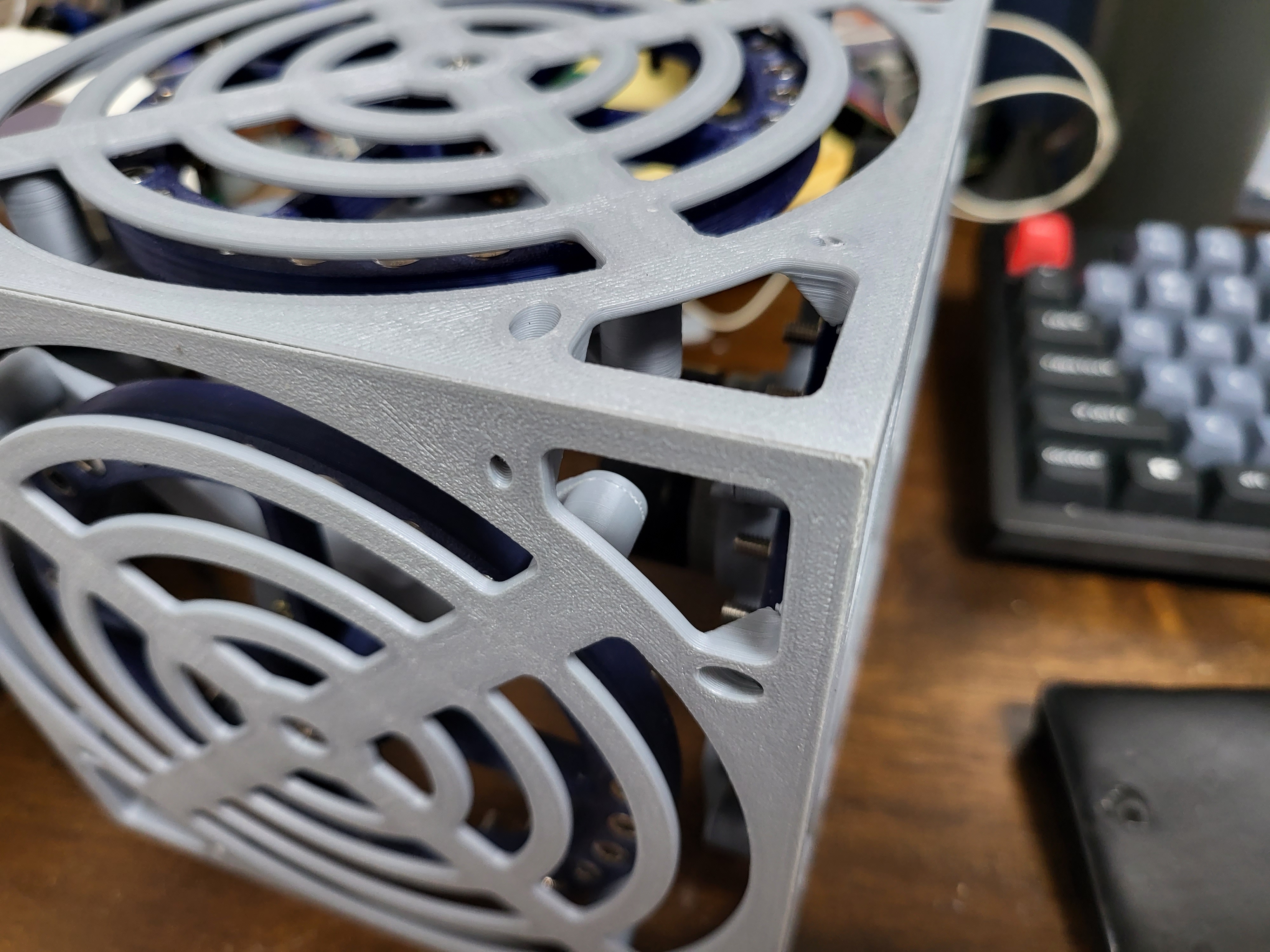
손보던 김에 전면 재설계에 들어갔습니다.


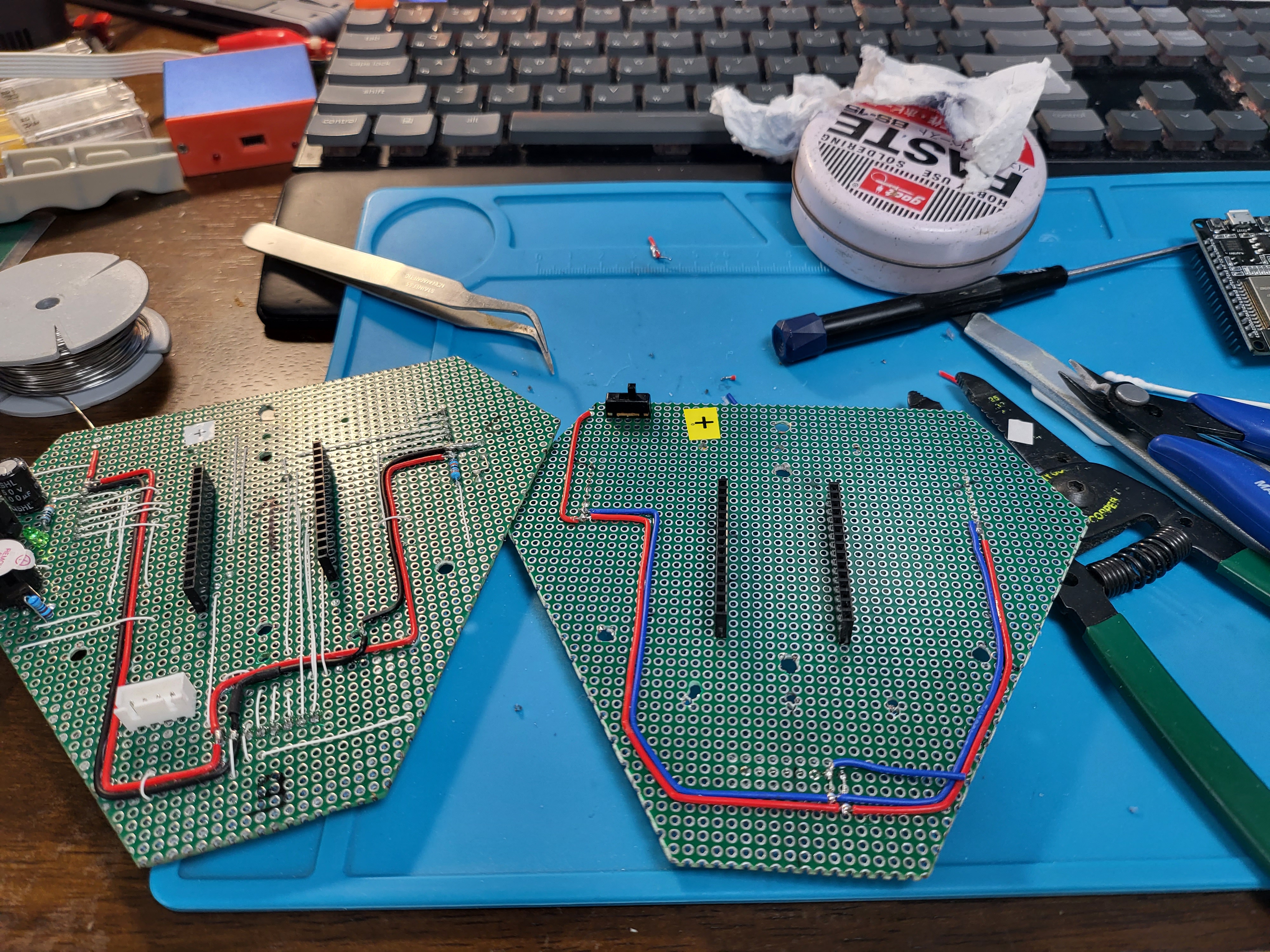
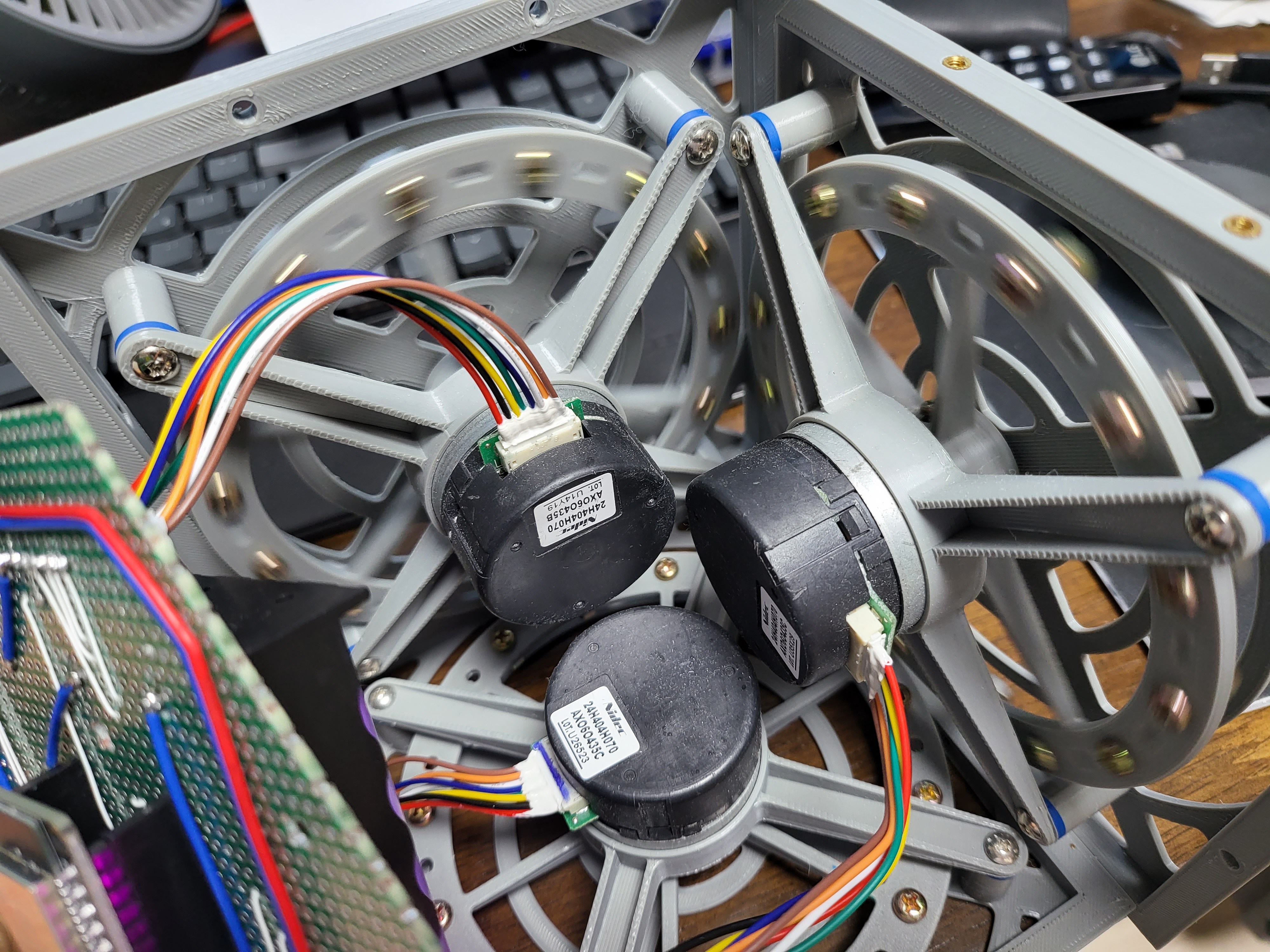
원본의 조립방식을 바꿔본다고 손댔던 지난번 설계는 정작 조립해보니 별로 낫지도 않더군요.
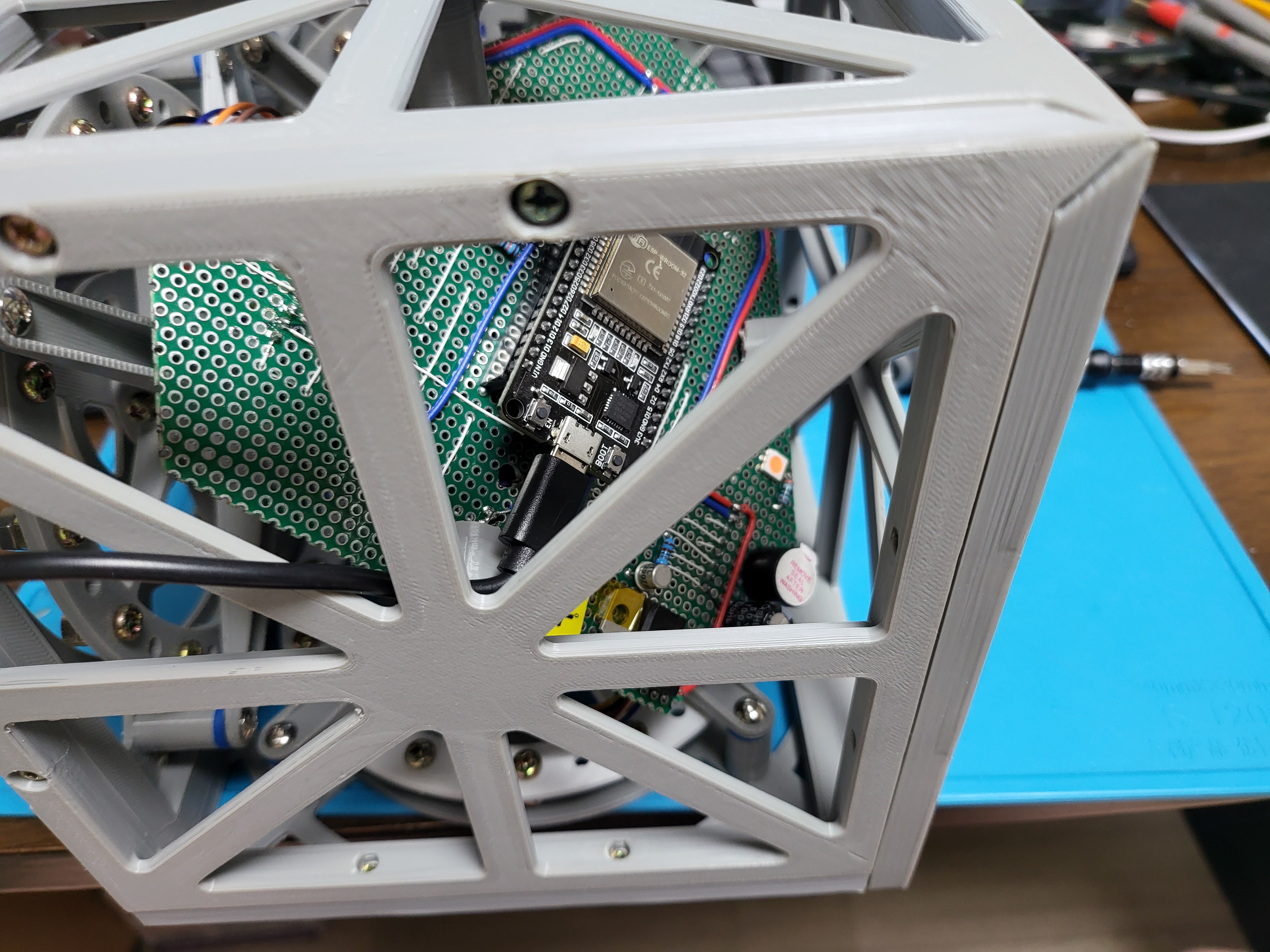
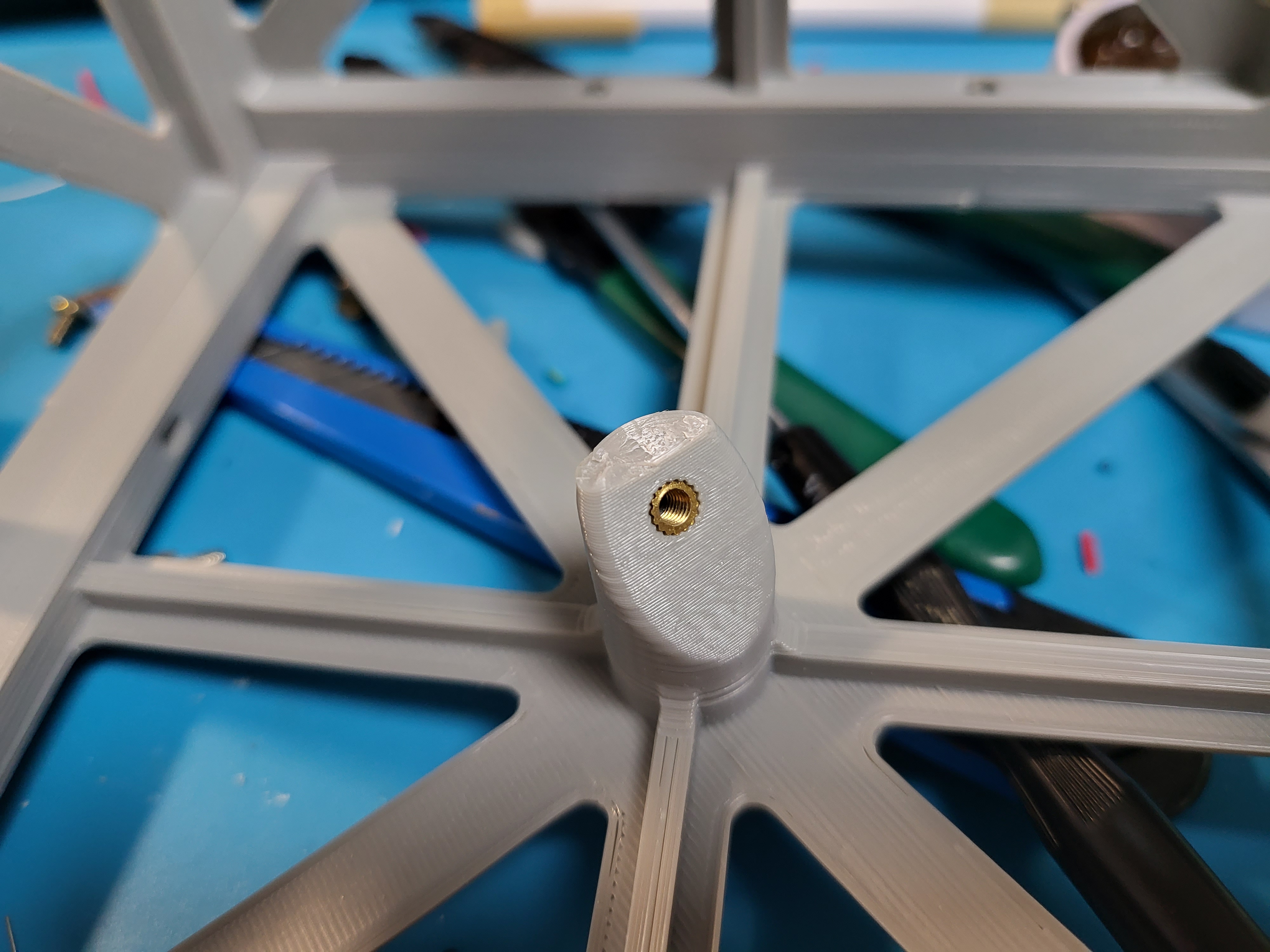
이번에는 모서리에서 45도 각도로 태핑나사로 조립하는 방식입니다. 훨씬 깔끔하고 편하군요.
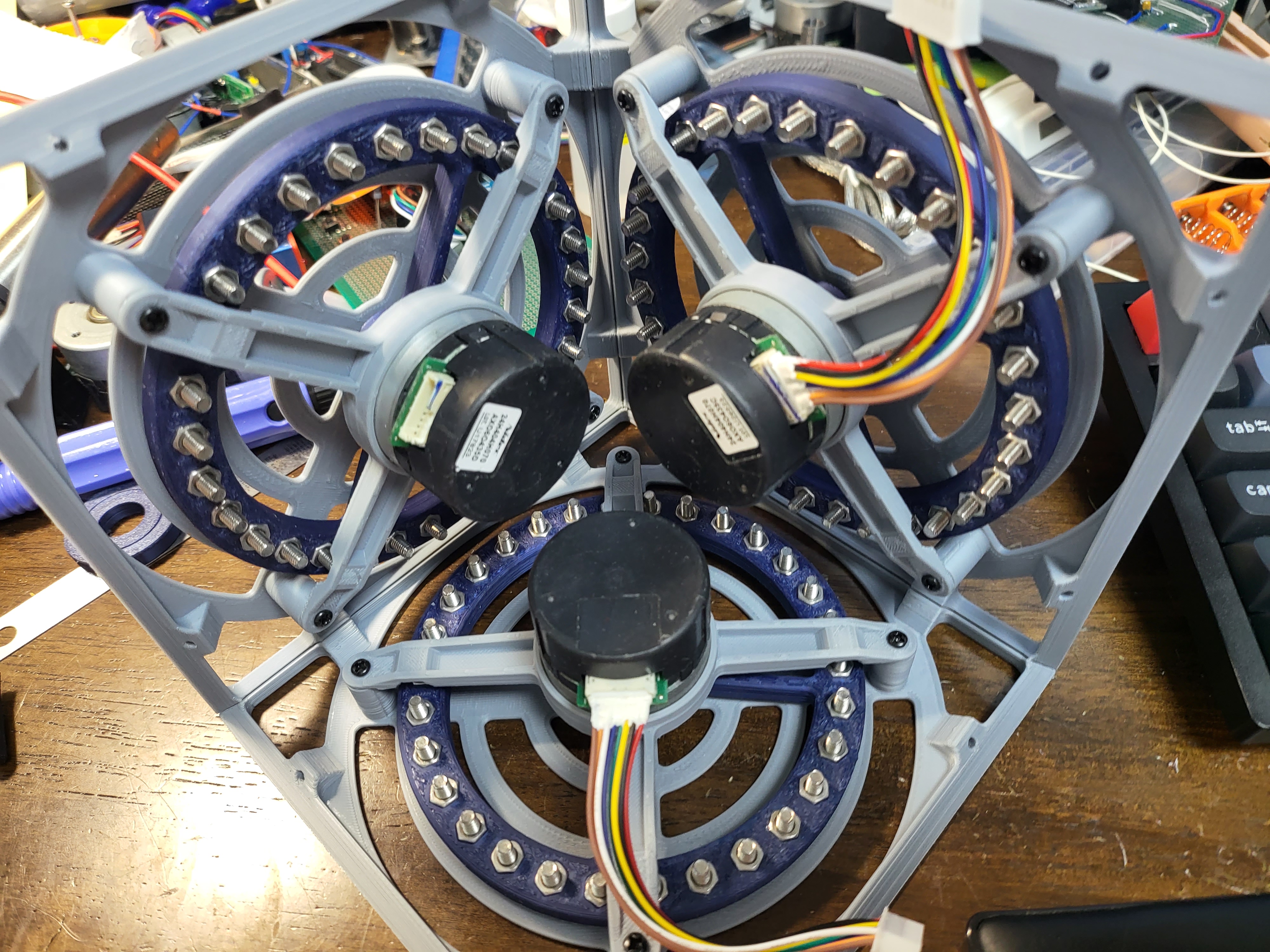
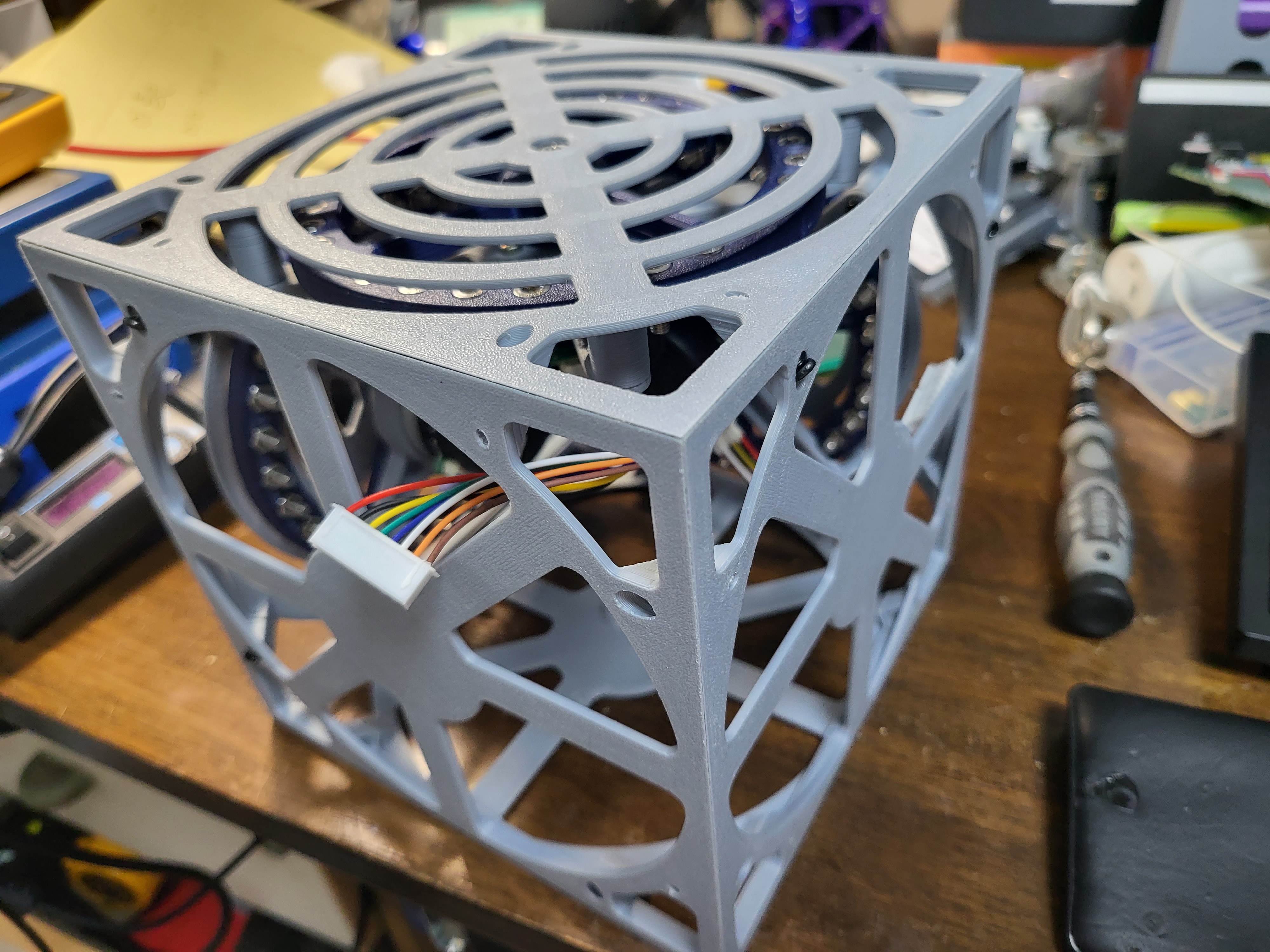
모서리가 칼같이 잘 맞아들어갑니다.
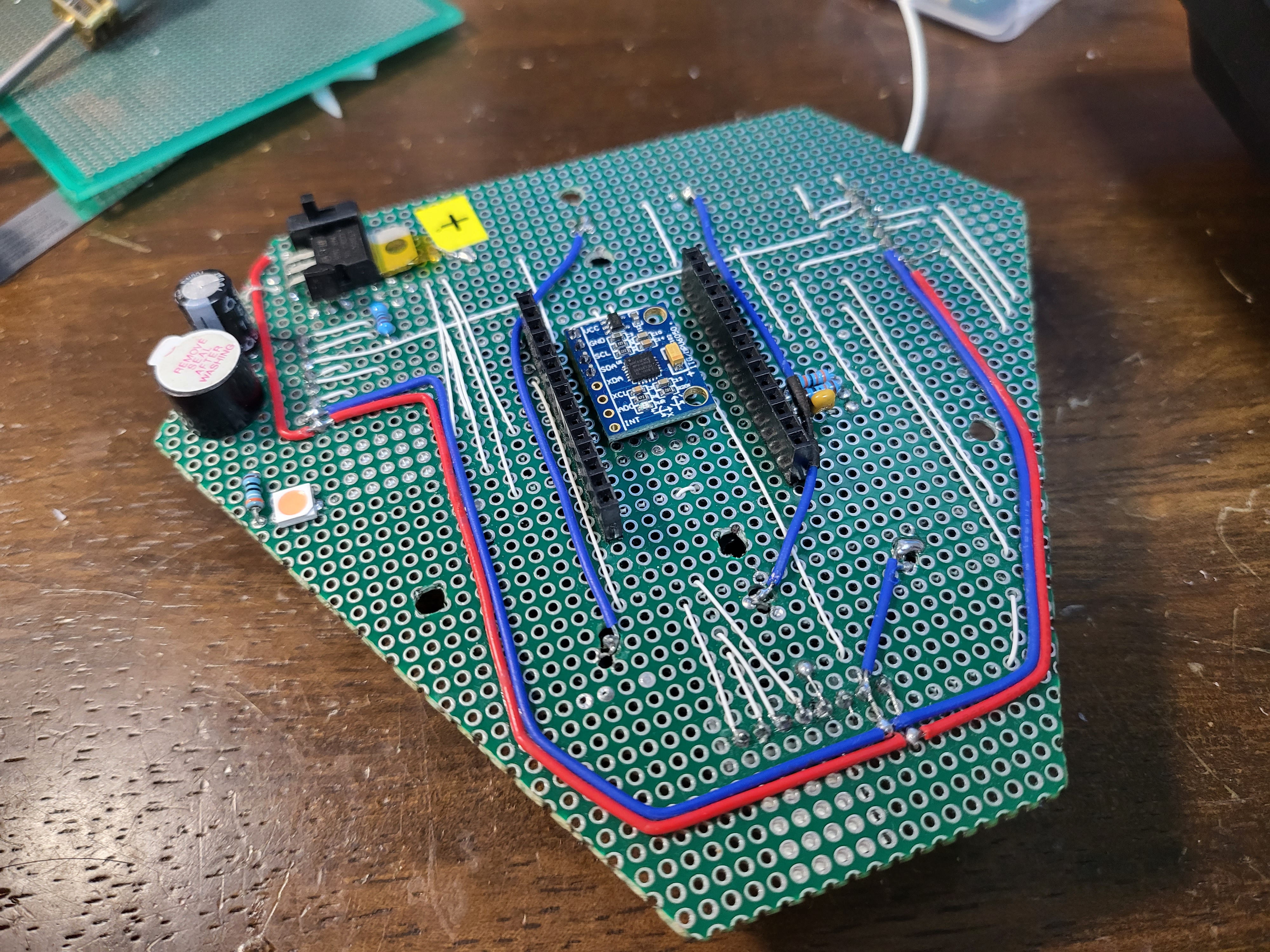
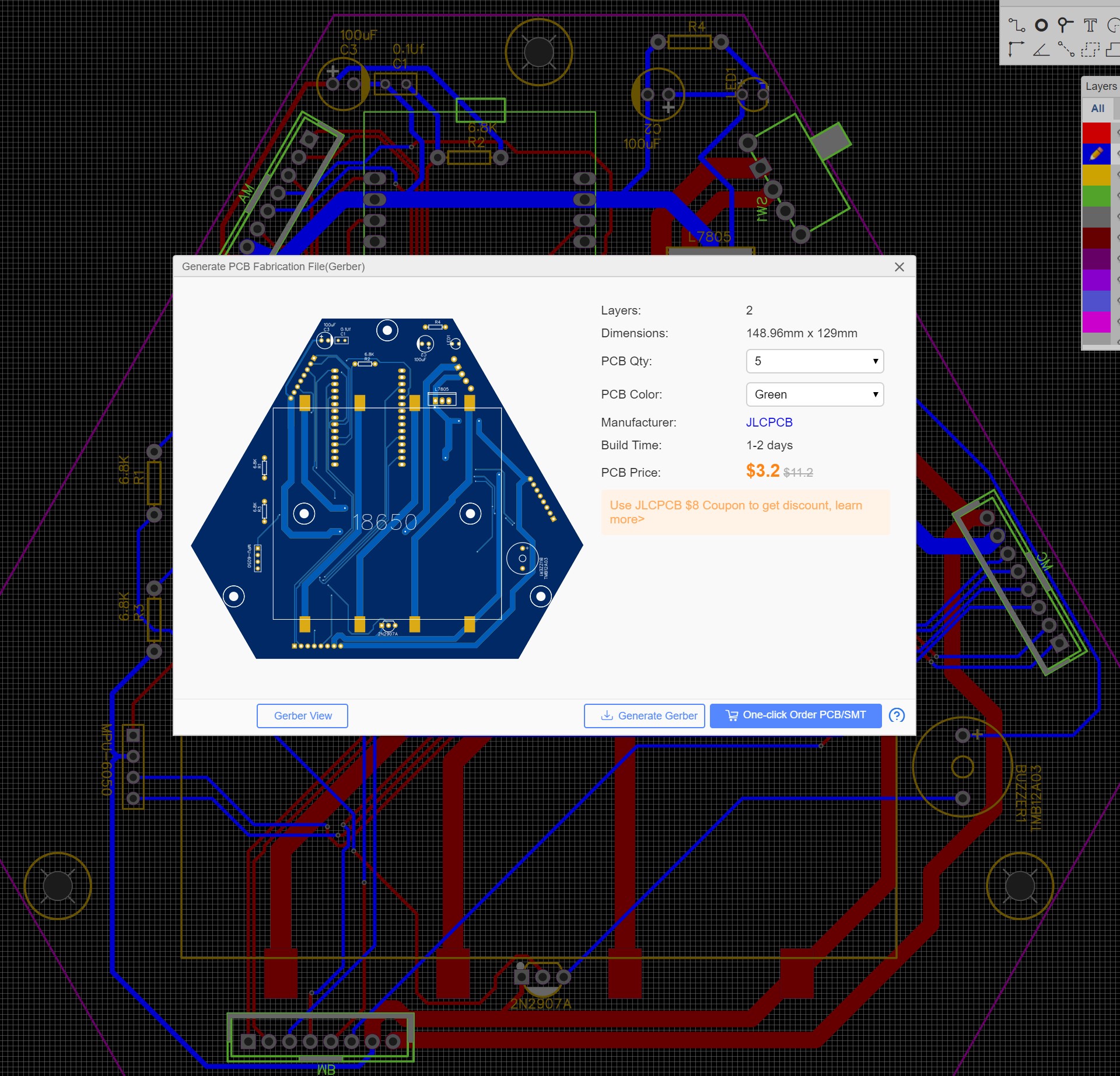
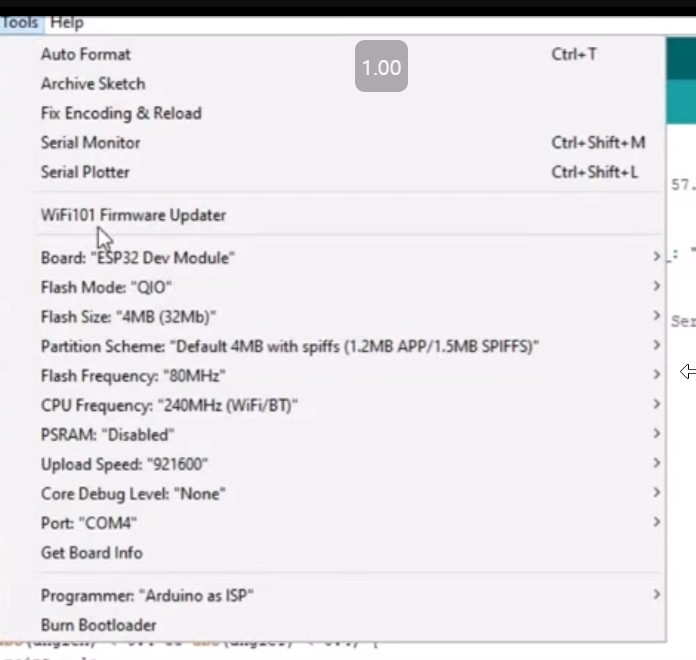
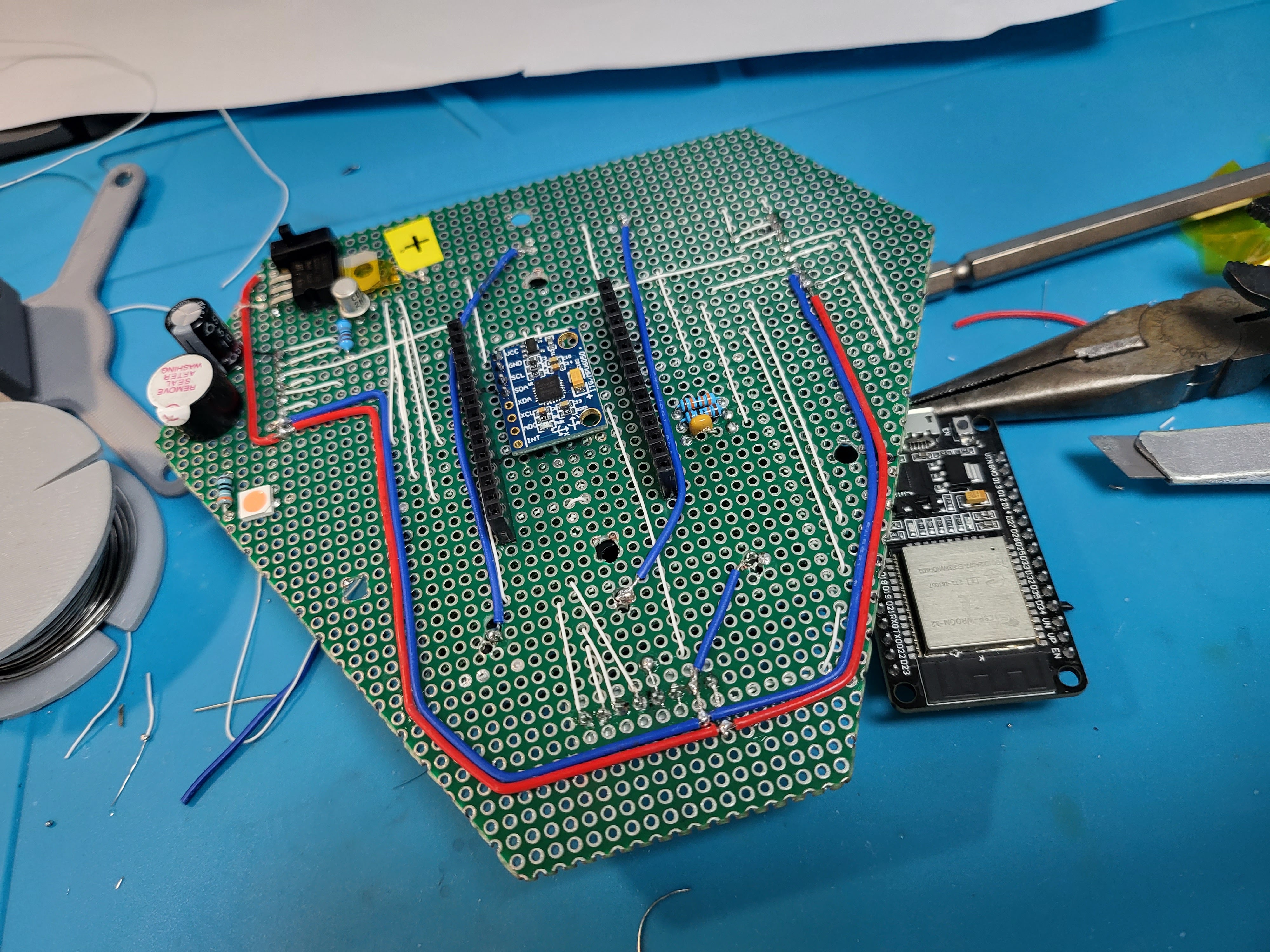
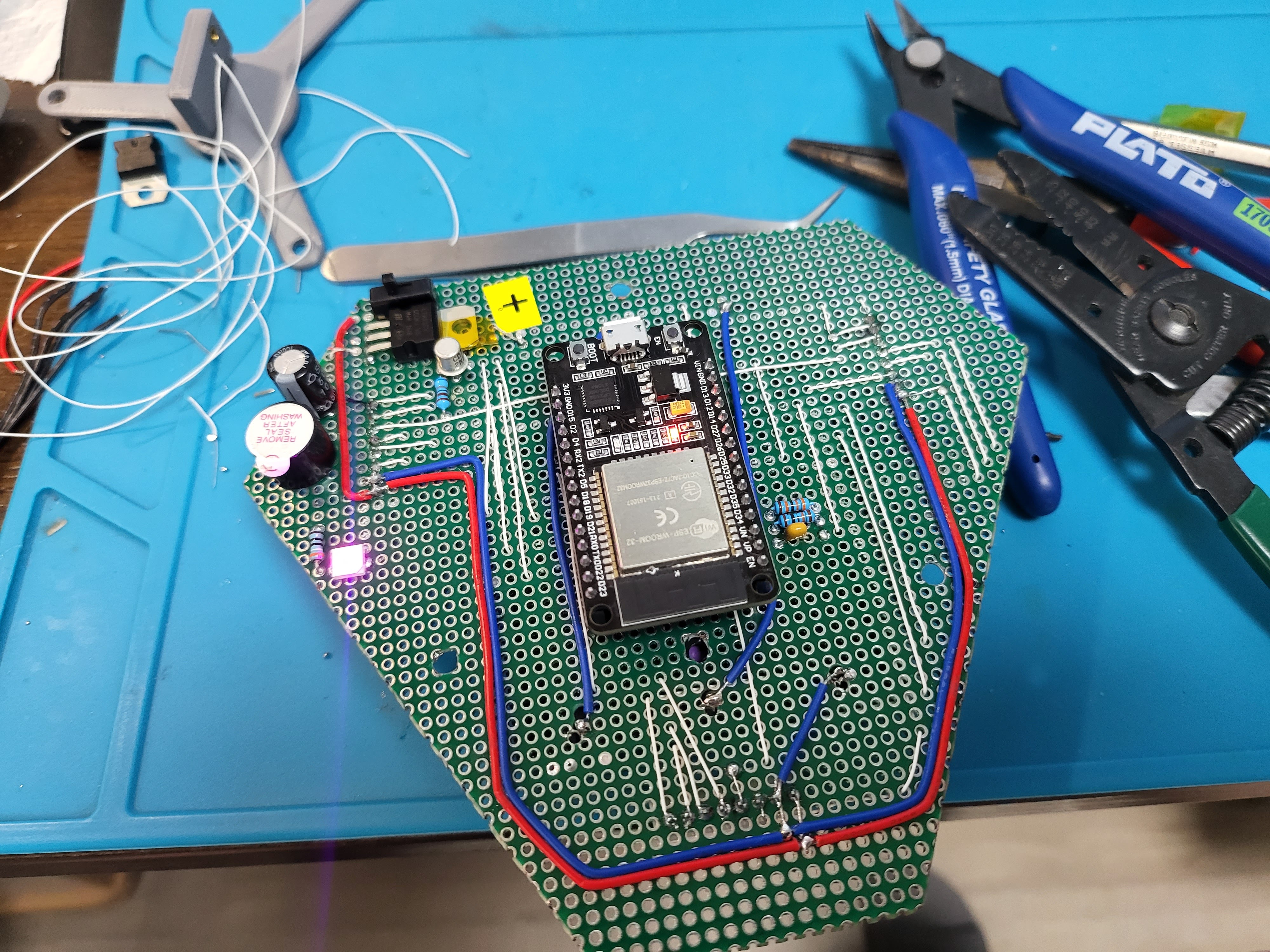
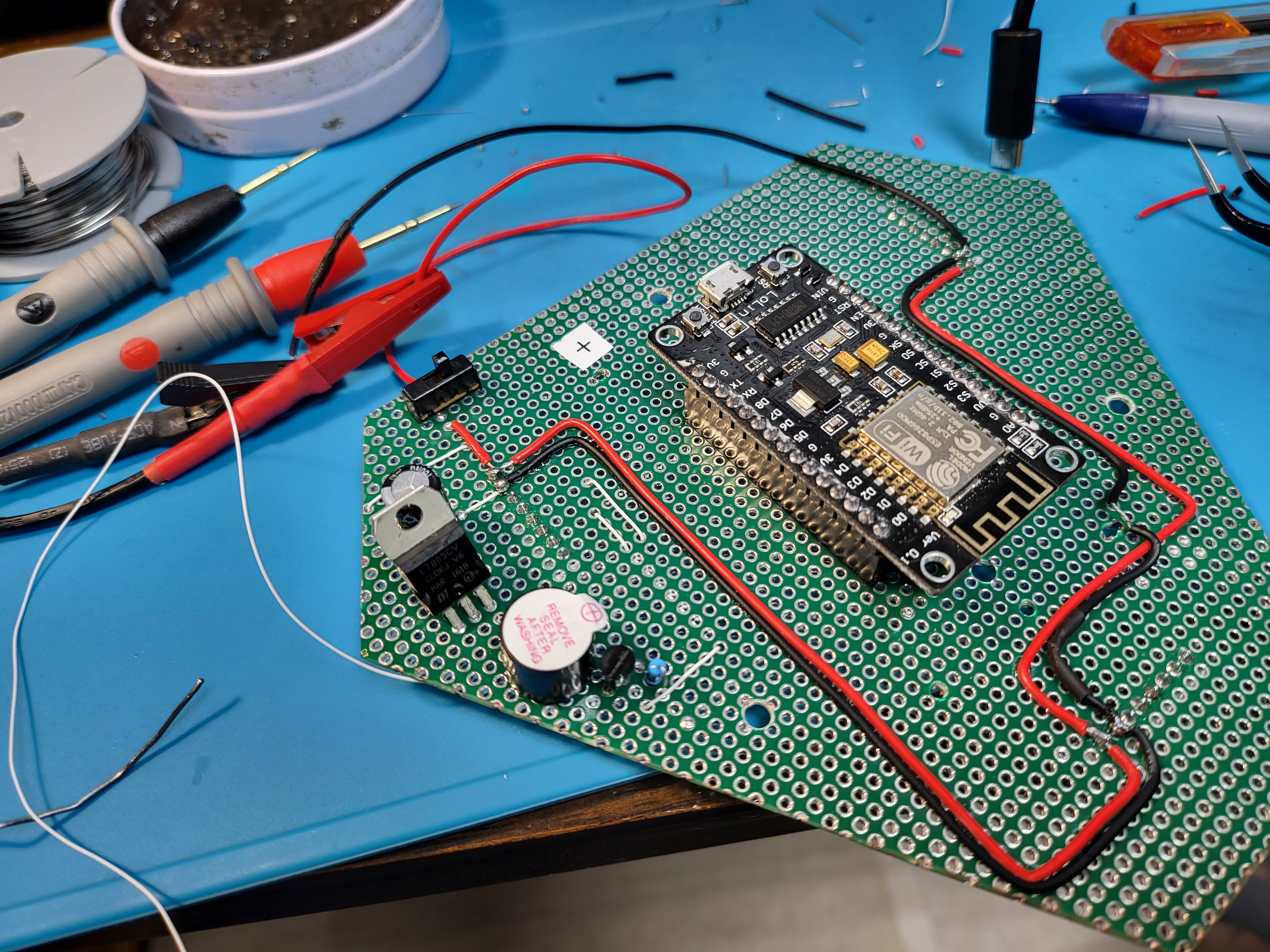
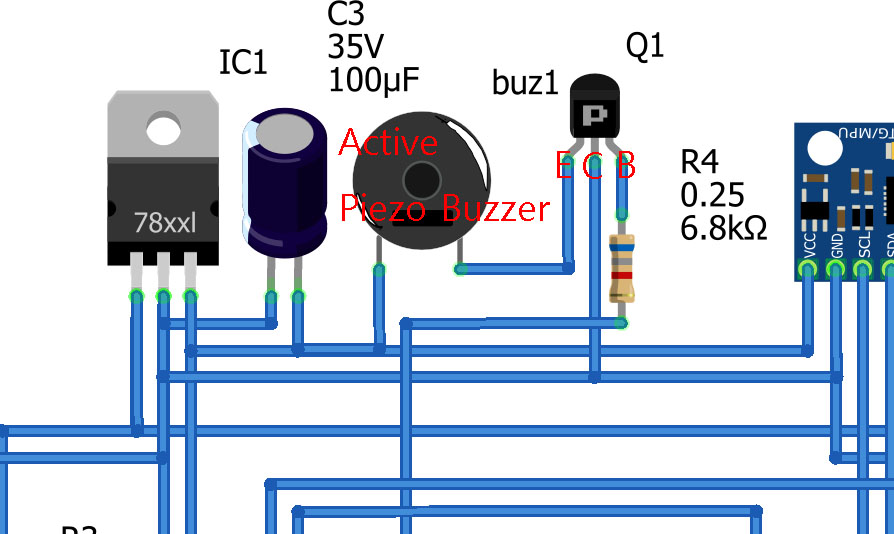
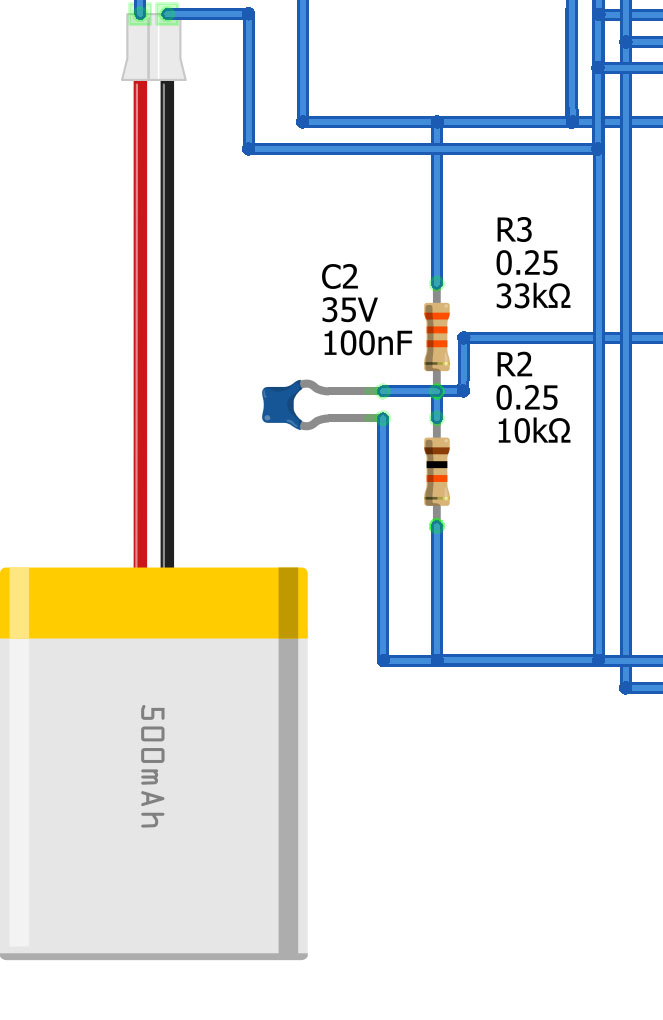
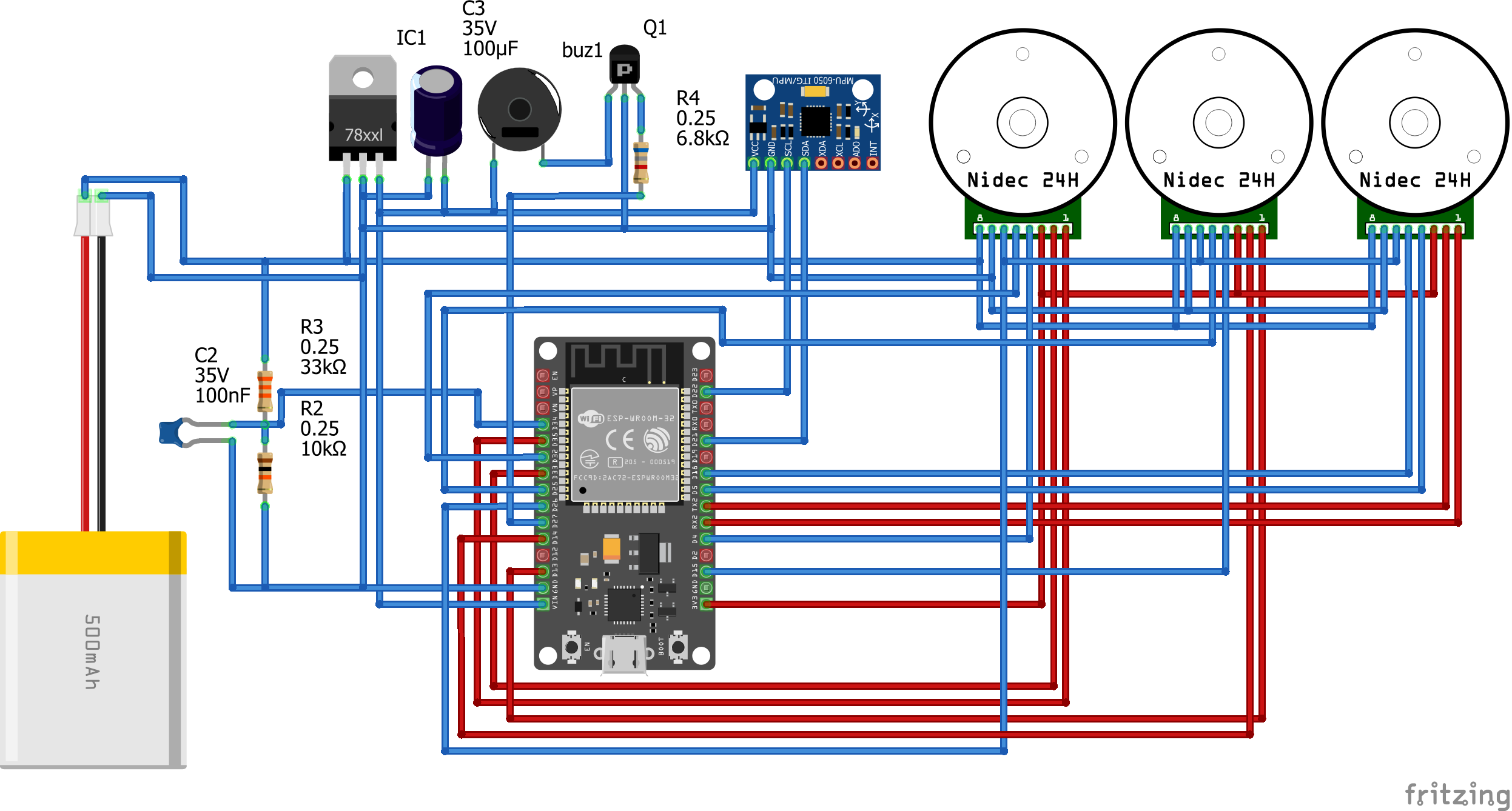
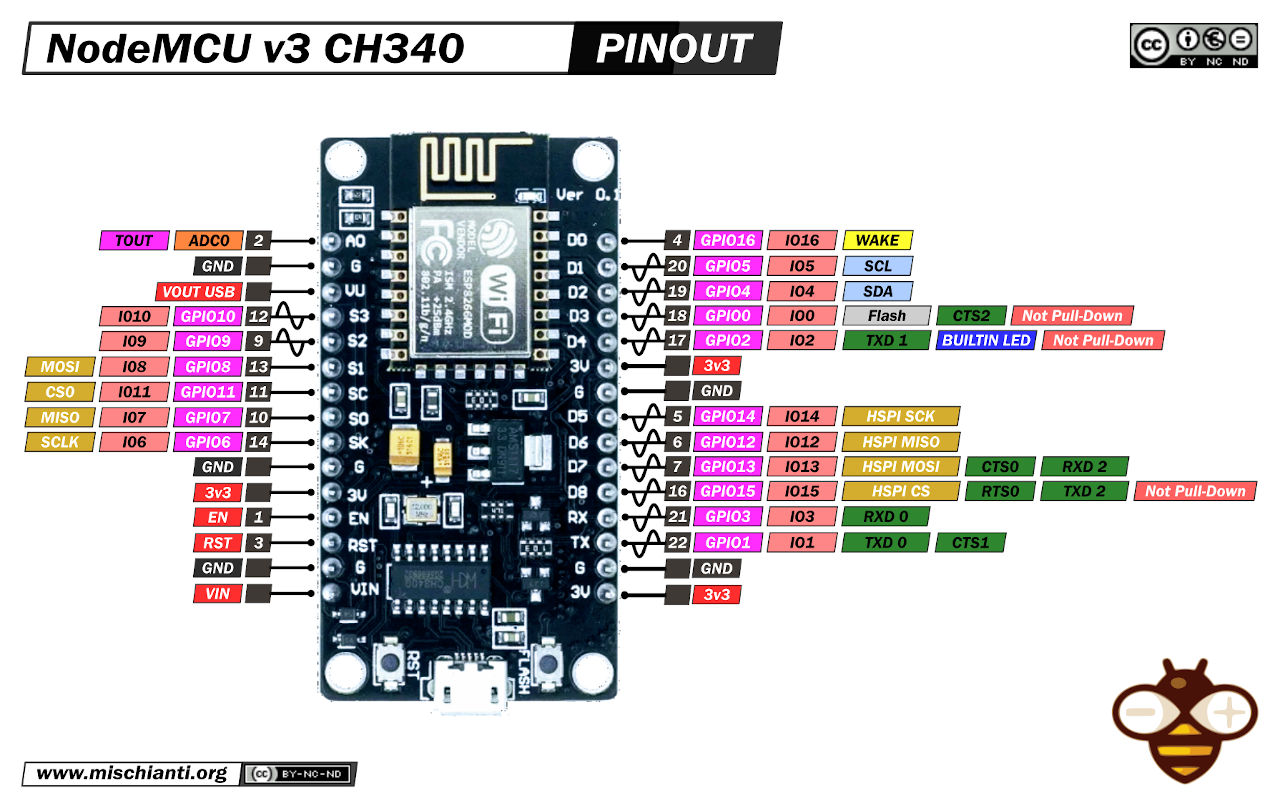
하는김에 PCB도 설계.
원래 EagleCad를 썼지만 Fusion360에 통합되고 나서는 업데이트도 잘 안되고 쓰기가 영 불편하더군요
그래서 EasyEDA로 바꿔봤습니다.
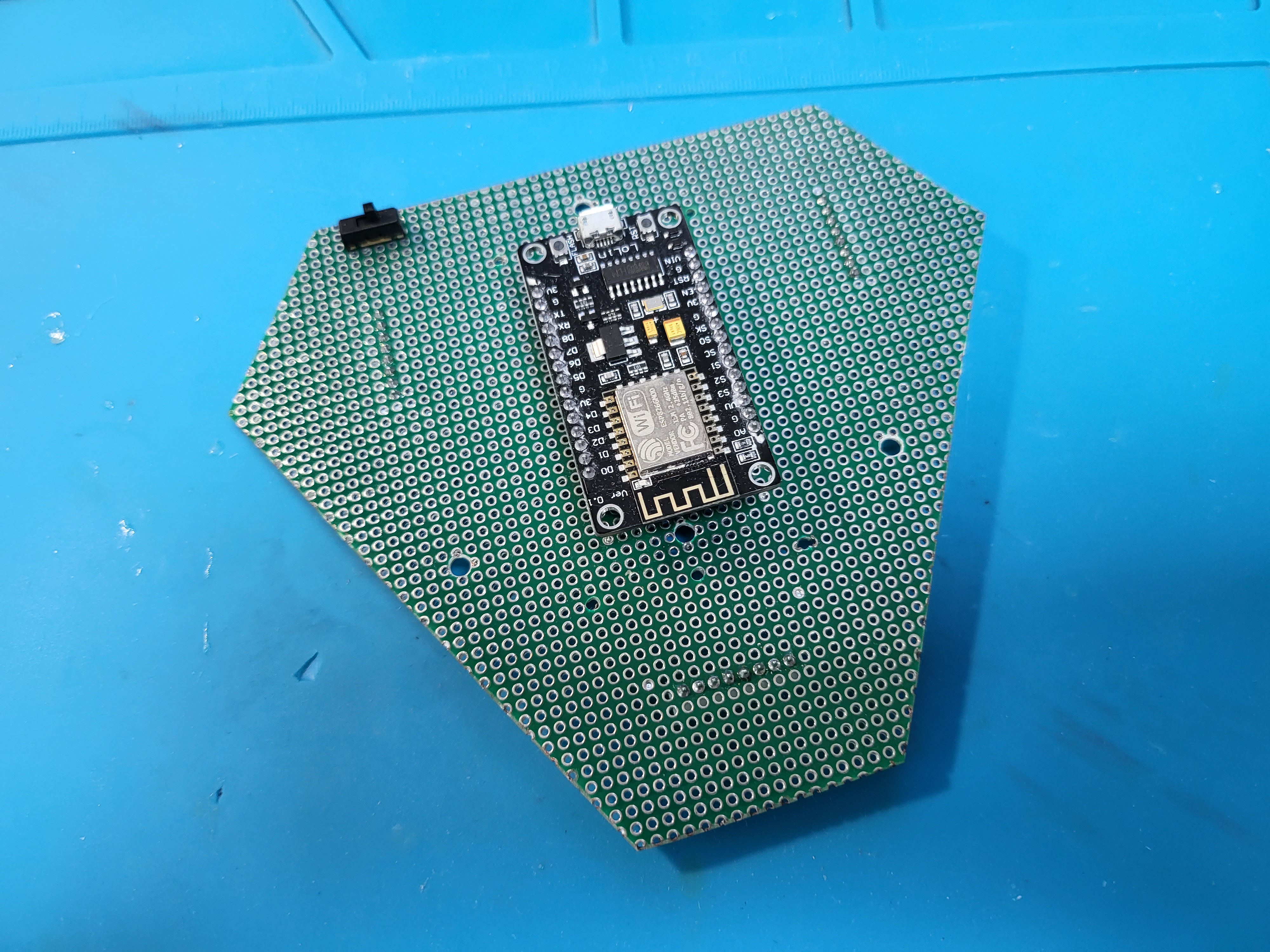
JLCPCB / LCSC 회사의 소프트웨어인데 프로그램 자체는 이글보다 낫진 않습니다.
하지만 일반적인 양면 PCB 설계하기엔 충분하고요.
무엇보다 LCSC에서 공급하는 부품을 전부 그대로 사용할 수 있어 라이브러리 면에서 대적할 자가 없네요.
설계를 마치면 JLCPCB에서 주문하면서 LCSC에서 부품주문도 동시에 할 수 있는 시스템이라
몇만원에 납땜까지 완성된 PCB를 그대로 받아 볼 수 있습니다.
조만간 다른 프로젝트 PCB 주문할때 같이 하려고 일단은 묵혀 두는 중입니다.
------------------------------------추가--------------------------------------------------------
이번에 PCB주문하면서 부품주문도 같이 하려했더니 안되더군요.
검색해보니 세금신고관련 문제로 합배송이 안되게 바뀌었다네요.
'Making > Self Balancing Cube' 카테고리의 다른 글
| Self Balancing Cube 셀프 밸런싱 큐브 제작기 #5 (0) | 2023.06.05 |
|---|---|
| Self Balancing Cube 셀프 밸런싱 큐브 제작기 #4 (0) | 2023.05.30 |
| Self Balancing Cube 셀프 밸런싱 큐브 제작기 #3 (0) | 2023.03.05 |
| Self Balancing Cube 셀프 밸런싱 큐브 제작기 #2 - 납땜과 조립 (0) | 2023.01.20 |
| Self Balancing Cube 셀프 밸런싱 큐브 제작기 #1 - 사전준비 (0) | 2023.01.18 |