728x90

원래 예전에 달았어야 했는데 귀찮음에 미루다가 며칠간 뚝닥 작업했습니다.
스탠드업 책상에서 책상을 쭉 올리다 보면 데스크탑과 연결된 여러 케이블의 길이가 모자라지며 문제를 일으킵니다.
(USB케이블이나 HDMI케이블이나 전원케이블 등)
앉은 채로 작업을 하면서 작업에 따라 약간씩 위치를 바꾸다 보니 크게 필요하진 않았습니다만
아무래도 약간은 불편함이 있어서 기성품을 알아보니 가격이 무식하게 비싸 보이더군요. (5~6만원선)
그래서 2020프로파일을 부속과 택배비까지 포함해서 2만원정도에 주문했습니다.
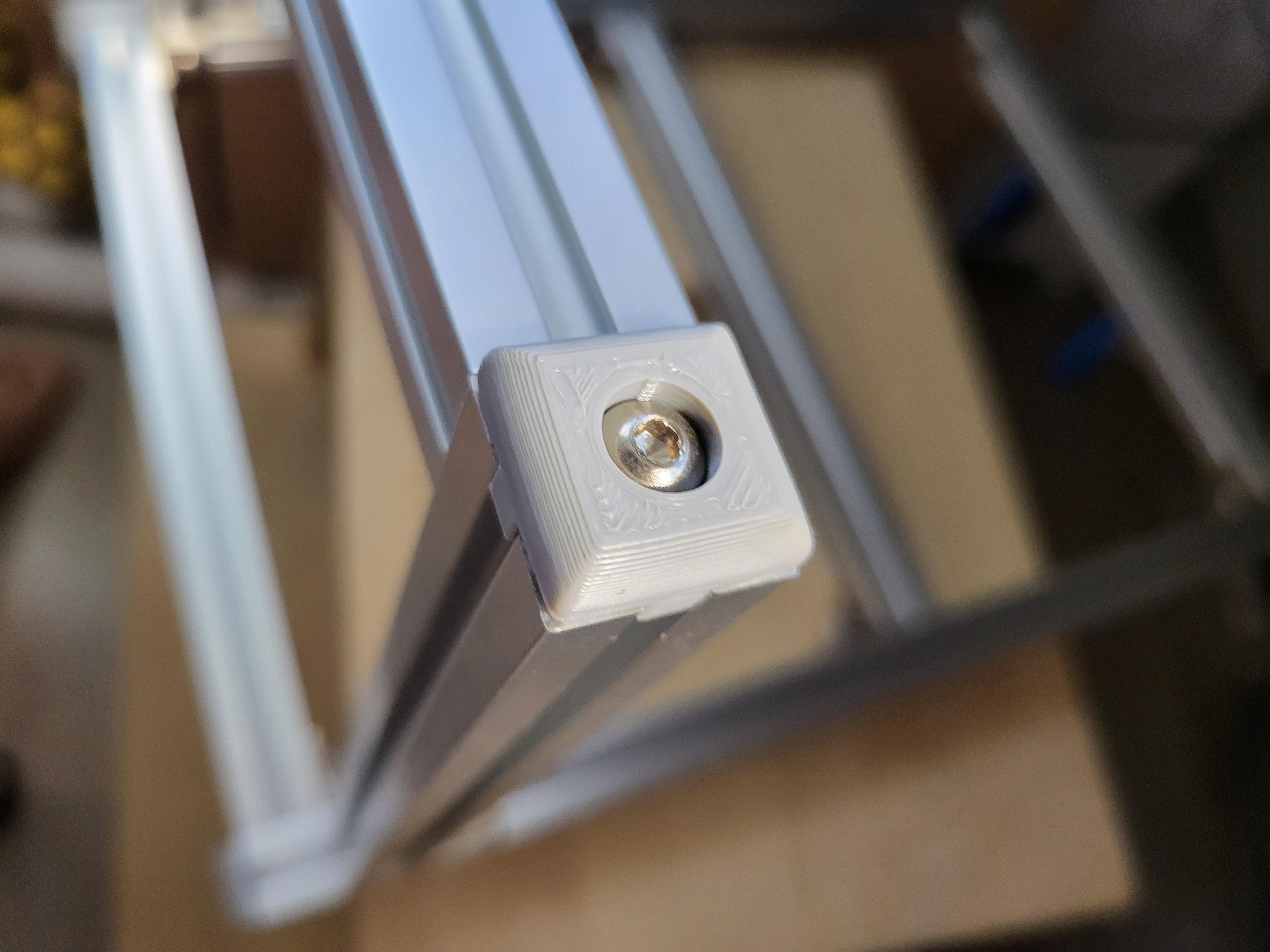

엔드캡과 보조부품은 3D 프린팅으로 해결.

출력품으로 무게를 견뎌야 하기 때문에 3mm 전산볼트를 일일이 잘라 박아넣는 수고를 했습니다.
적어도 부러지진 않을 듯 합니다.

사이즈를 타이트하게 잡았기 때문에 위치가 간당간당 합니다. 벨크로 테잎을 이용해 살짝 묶어 주었습니다.
사진을 찍고보니 먼지가 상당하네요. 조만간 청소 한번 해줘야 겠습니다.
이렇게 하고나니 40인치 모니터에 각종 공구류에 스탠드에 스피커에 기타등등
무게가 상당해서 그런지 동작이 꽤 느립니다.
슬슬 SKARSTA 프레임의 한계가 아닌가 싶습니다.
요즘은 스탠딩 데스크 가격도 조금씩 내려오기도 했고 프레임만 따로 팔기도 하던데 어느정도 쓰다가 한계가 오면 교체할 생각입니다.
728x90
'[완료]Arduino Projects > 이케아 SKARSTA 높이조절책상 전동화' 카테고리의 다른 글
| 이케아 SKARSTA 커플러 교체. (0) | 2021.02.27 |
|---|---|
| 이케아 SKARSTA 자동화 부품 리스트. (0) | 2020.12.03 |
| 이케아 SKARSTA 자동화 #7 - 완료 (0) | 2020.11.28 |
| 이케아 SKARSTA 자동화 #6 - 모터 드라이버의 전류부족 문제. (0) | 2020.11.22 |
| 이케아 SKARSTA 자동화 #5 - eeprom.put()의 float 저장 문제 해결. (3) | 2020.07.15 |