OLED 통합한다고 해놓고 한참 걸렸네요.
부품 수급과 드라이버 회로 테스트하고 이것저것 하다보니 많이 늦었습니다.
처음 만든 회로는 실패하는 바람에 다시 한번 관련 자료를 찾아 회로를 수정하고 부품을 수급하고 테스트 과정을 거쳤습니다.
관련 포스팅 : https://pashiran.tistory.com/1375
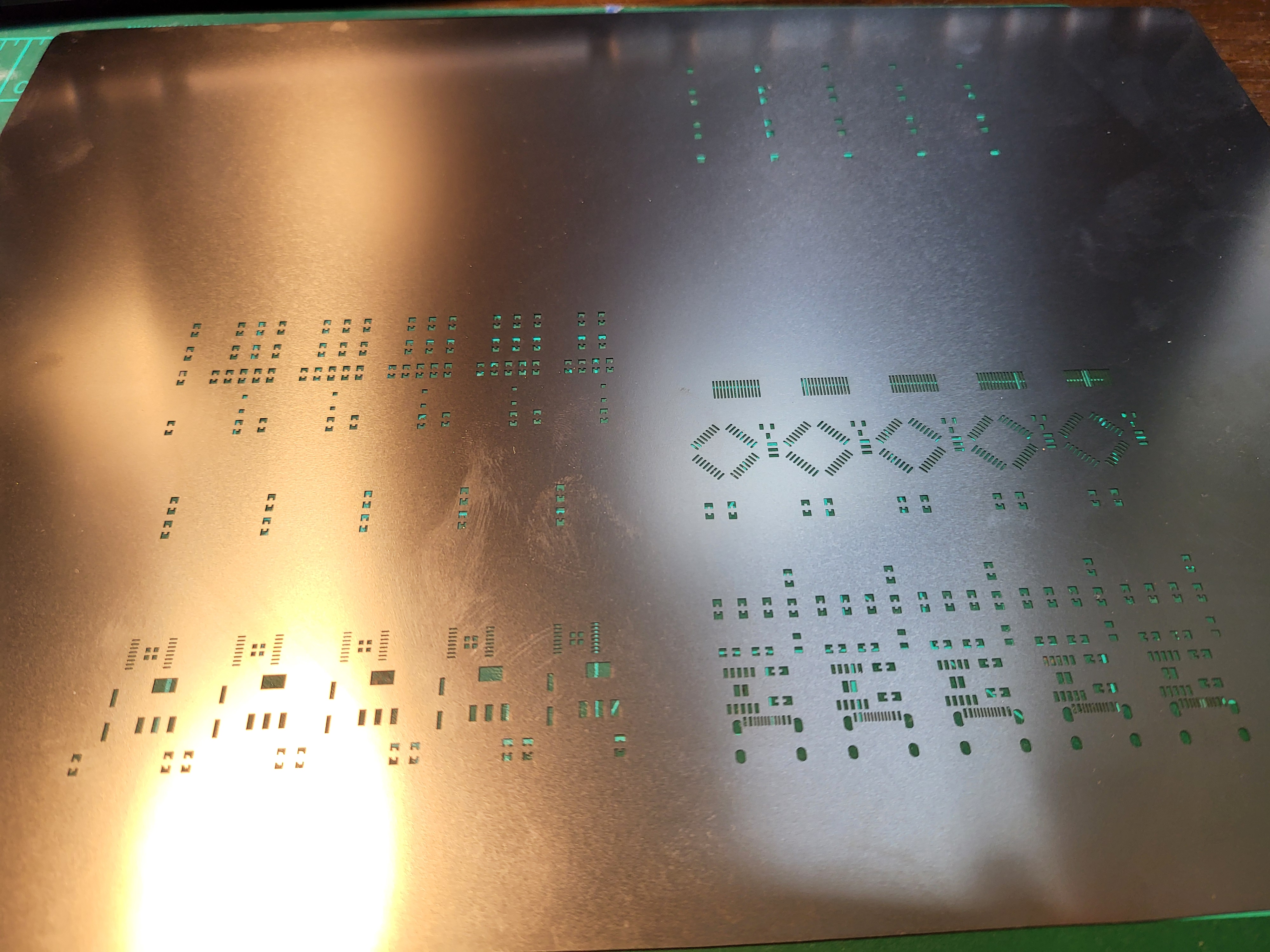
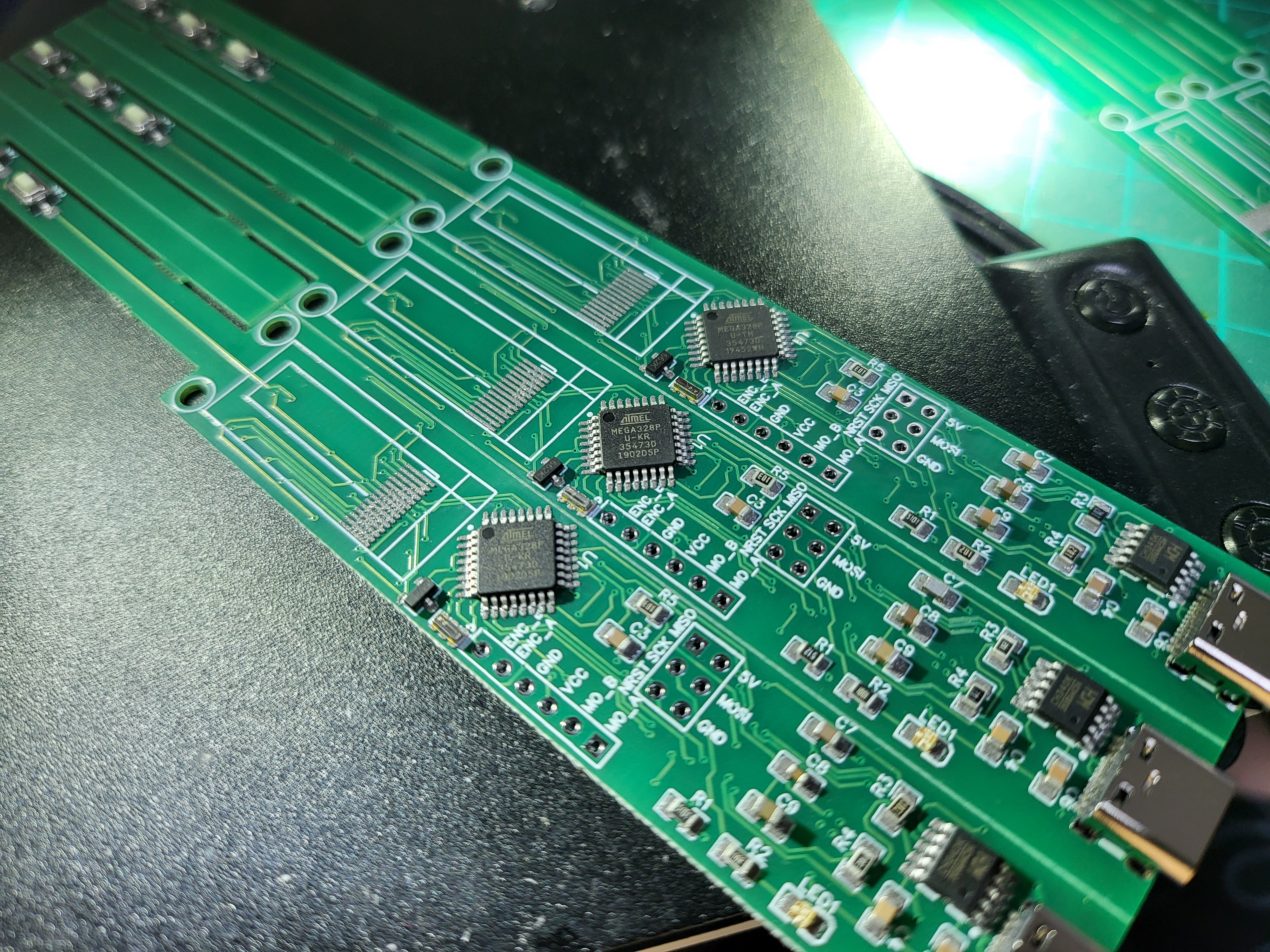
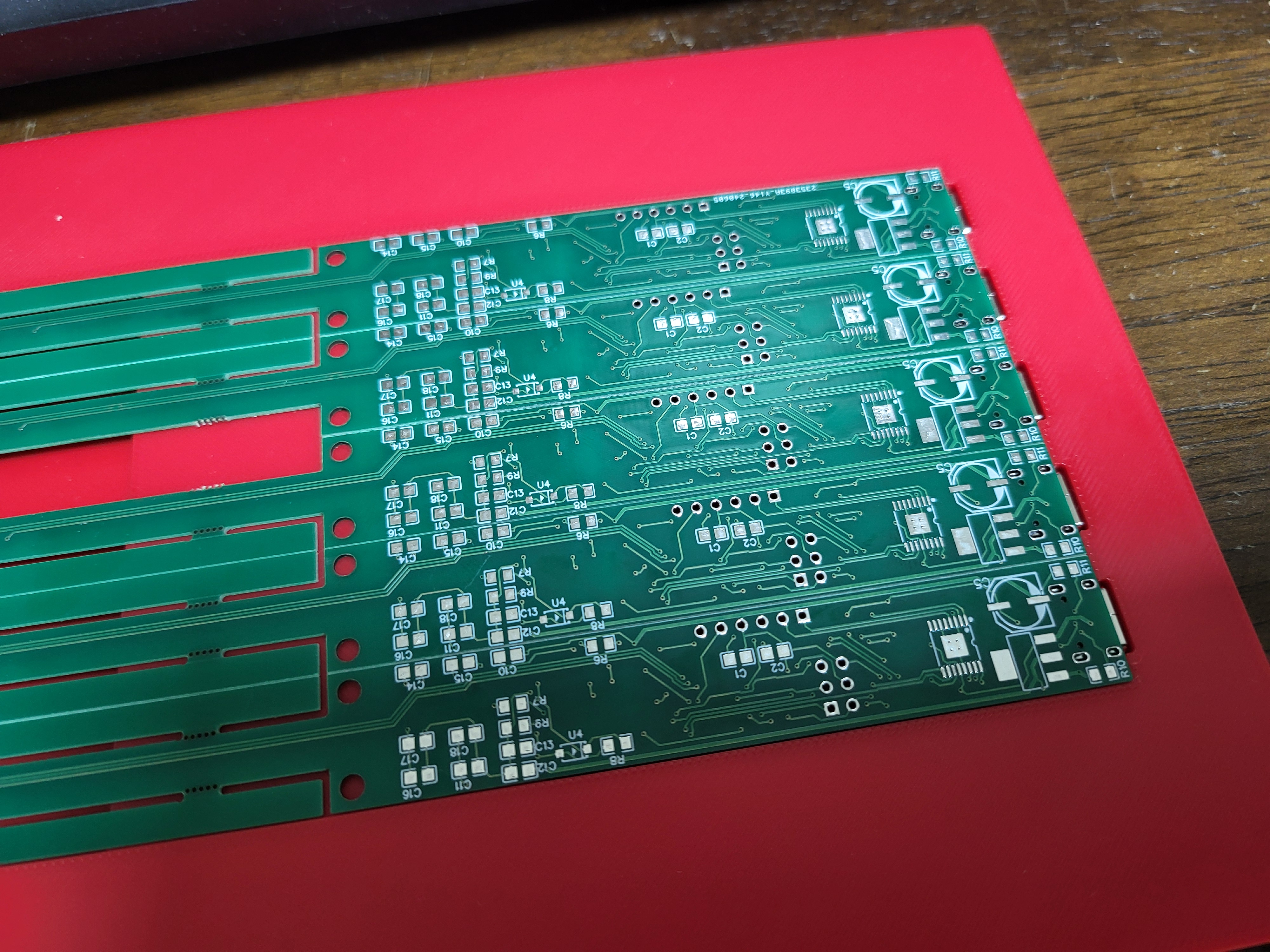
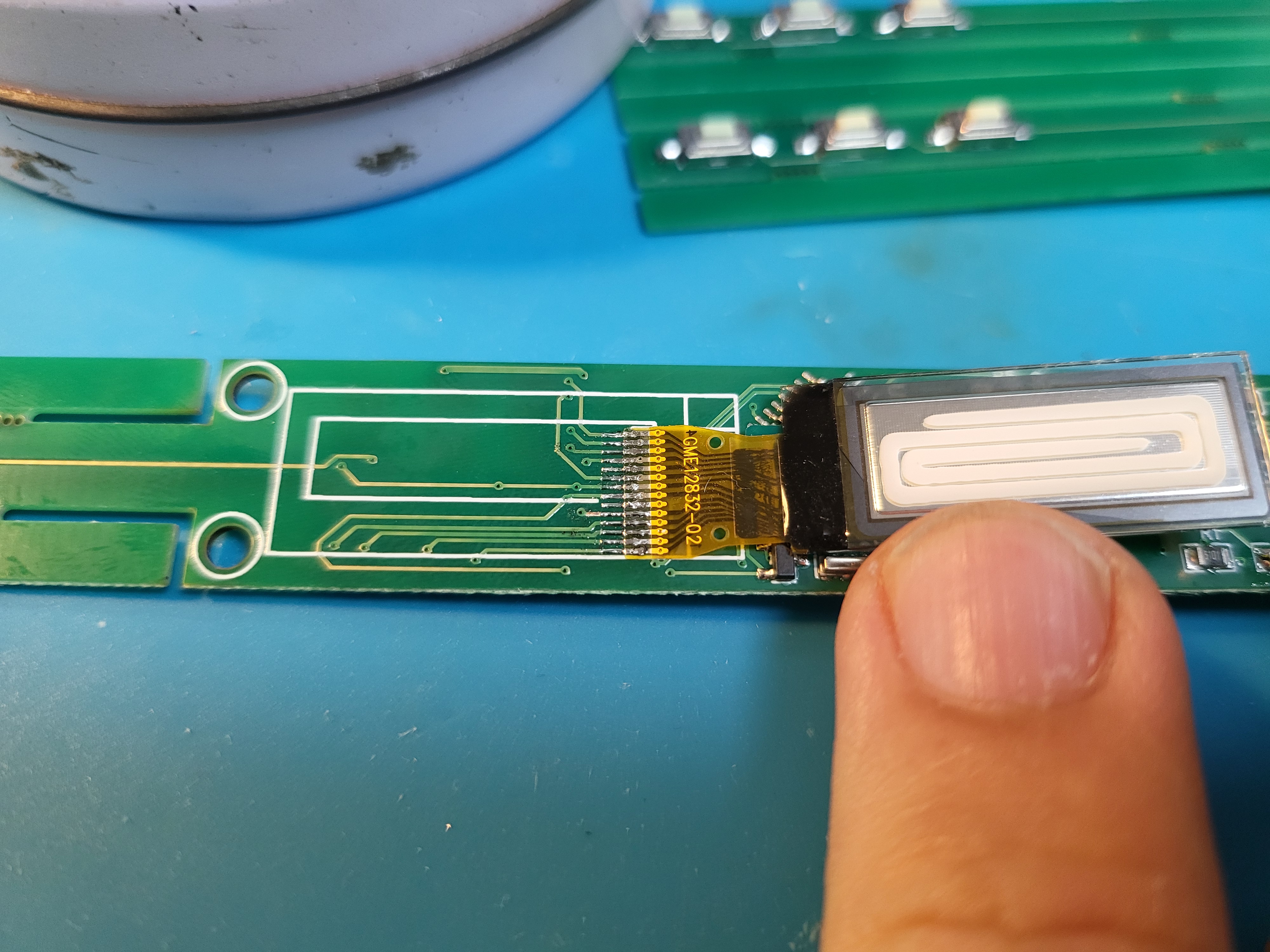
실크스크린을 이용해 납을 올리고 핀셋으로 하나하나 부품을 올려줍니다.
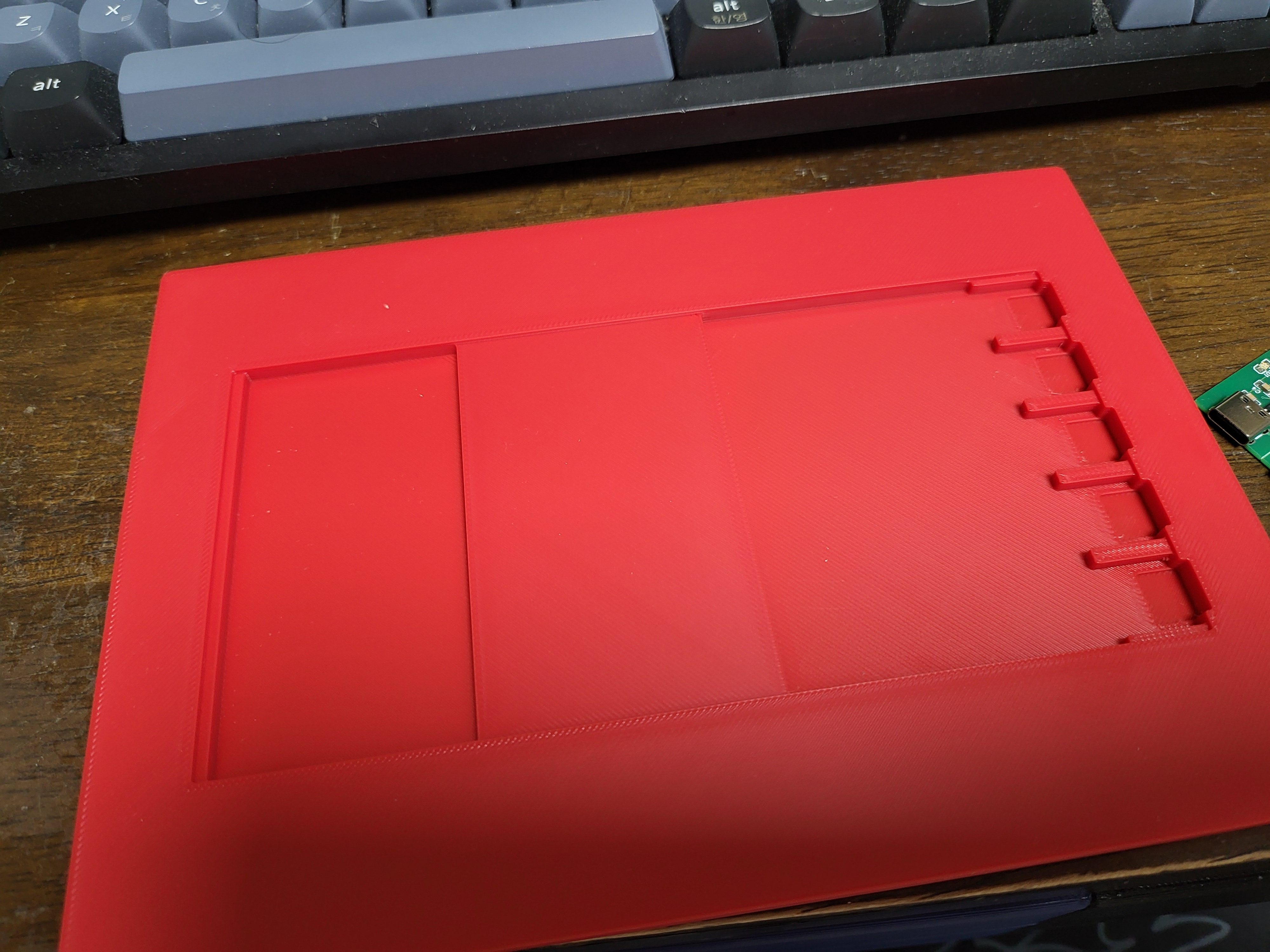
저는 오븐이 아니라 핫 플레이트를 사용하는지라 앞면에 부품이 납땜된 후에 뒷면에 부품을 올리기 어렵습니다.
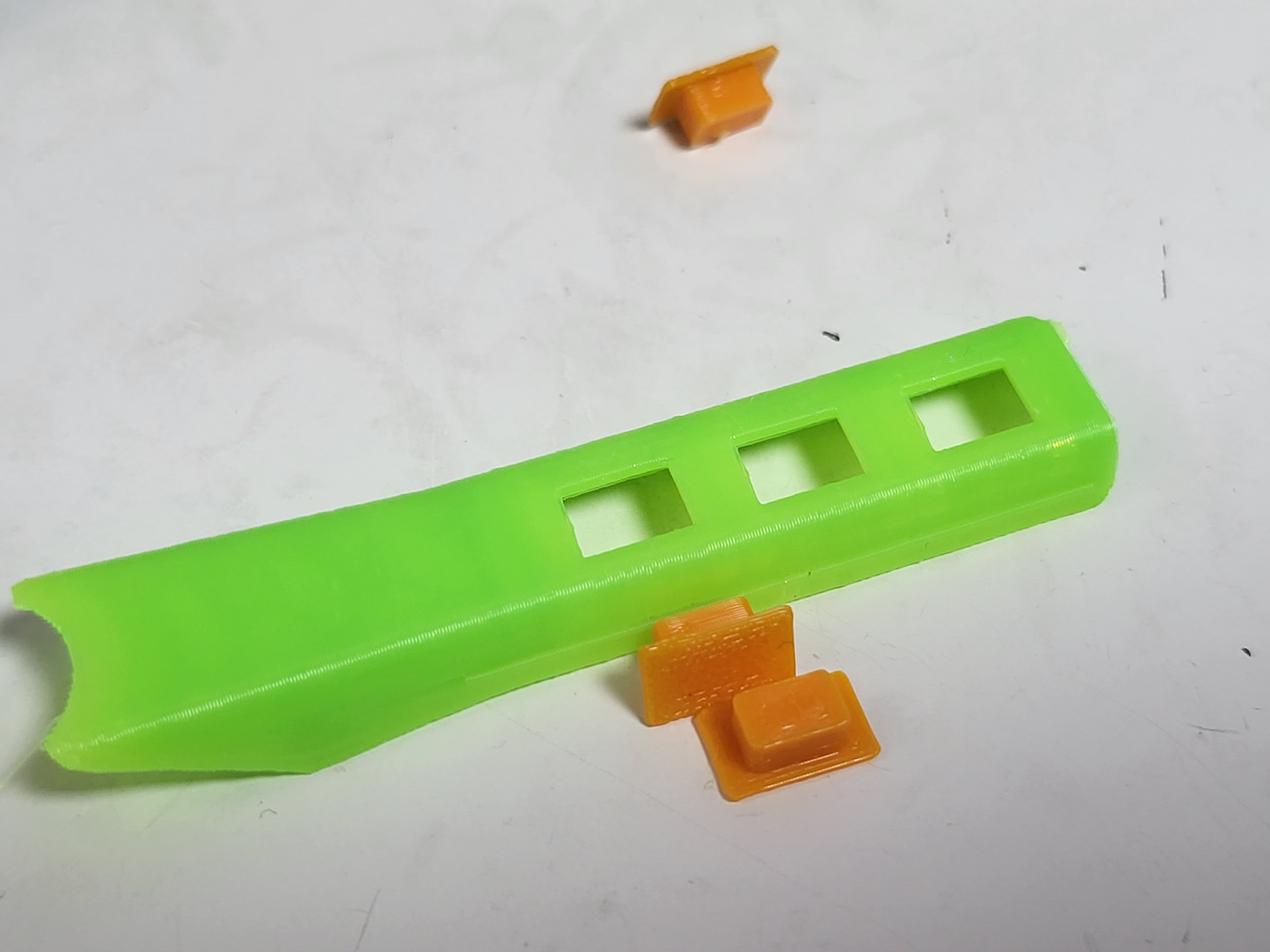
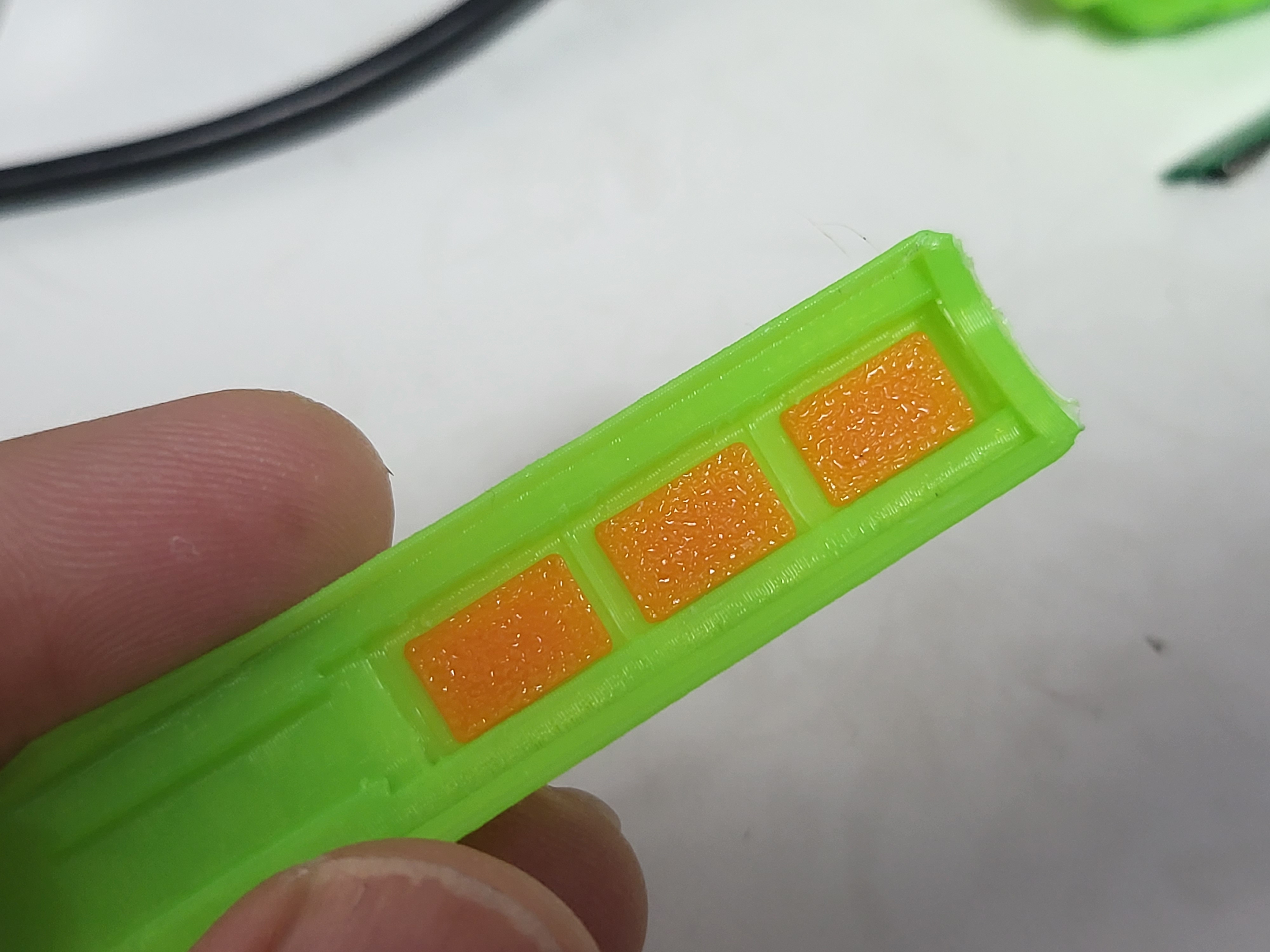
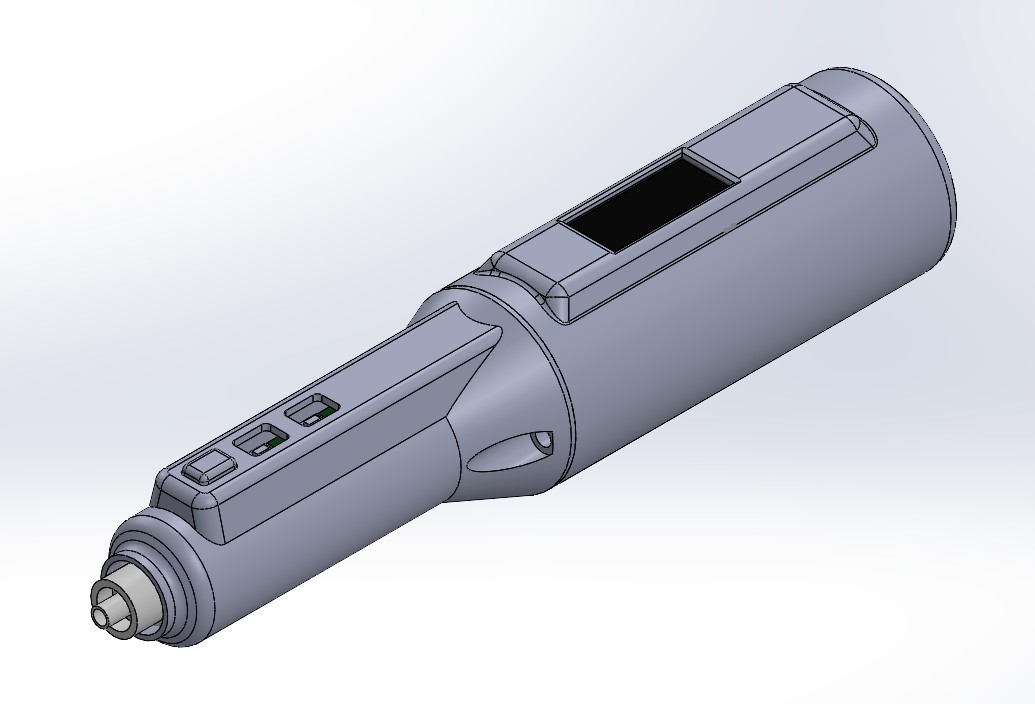
그래서 급하게 솔리드웍스에서 지그 설계를 하고 출력해 사용했습니다.
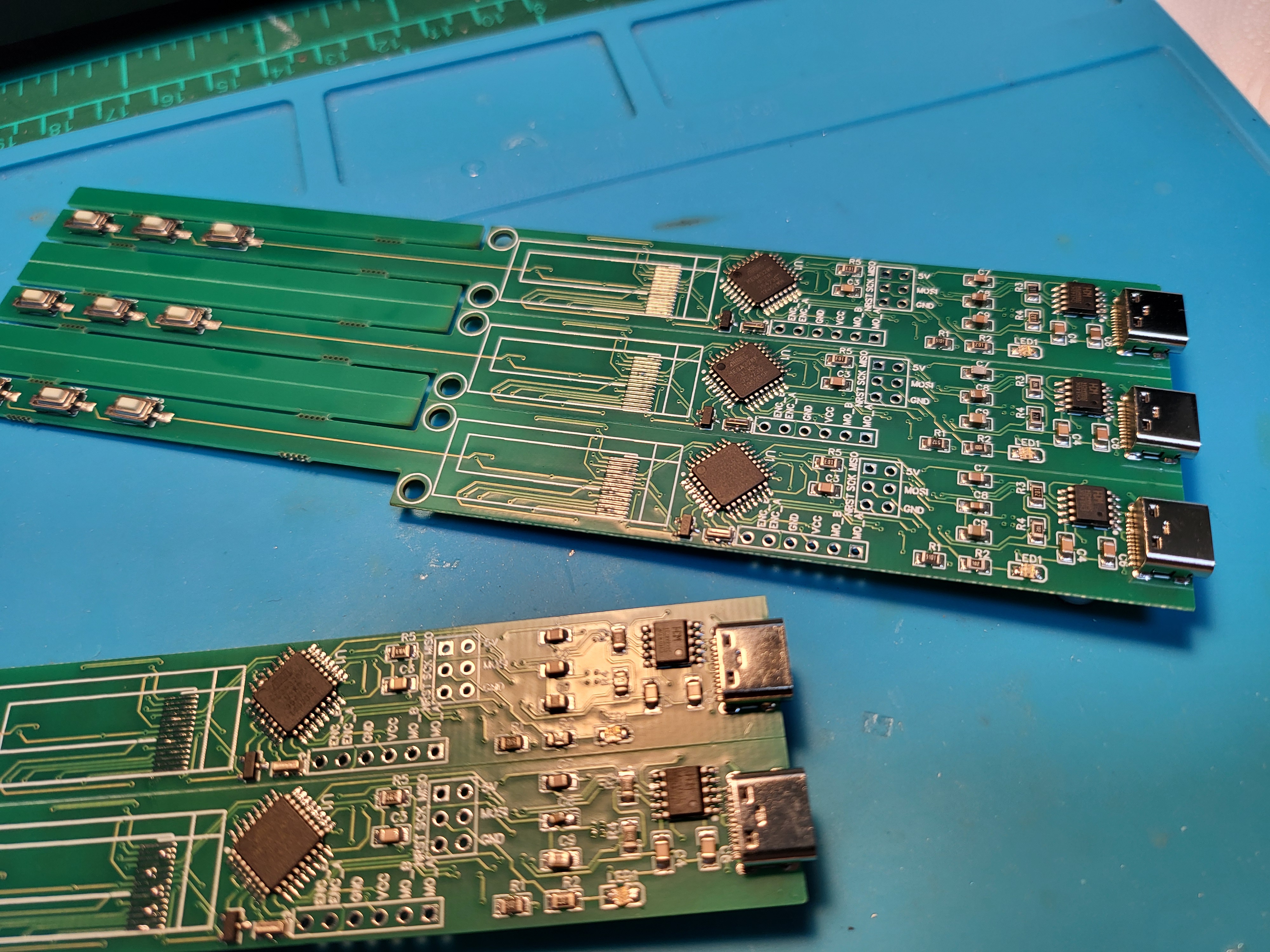
이후 뒷면은 히팅 건으로 가열해서 마무리를 해 줍니다.
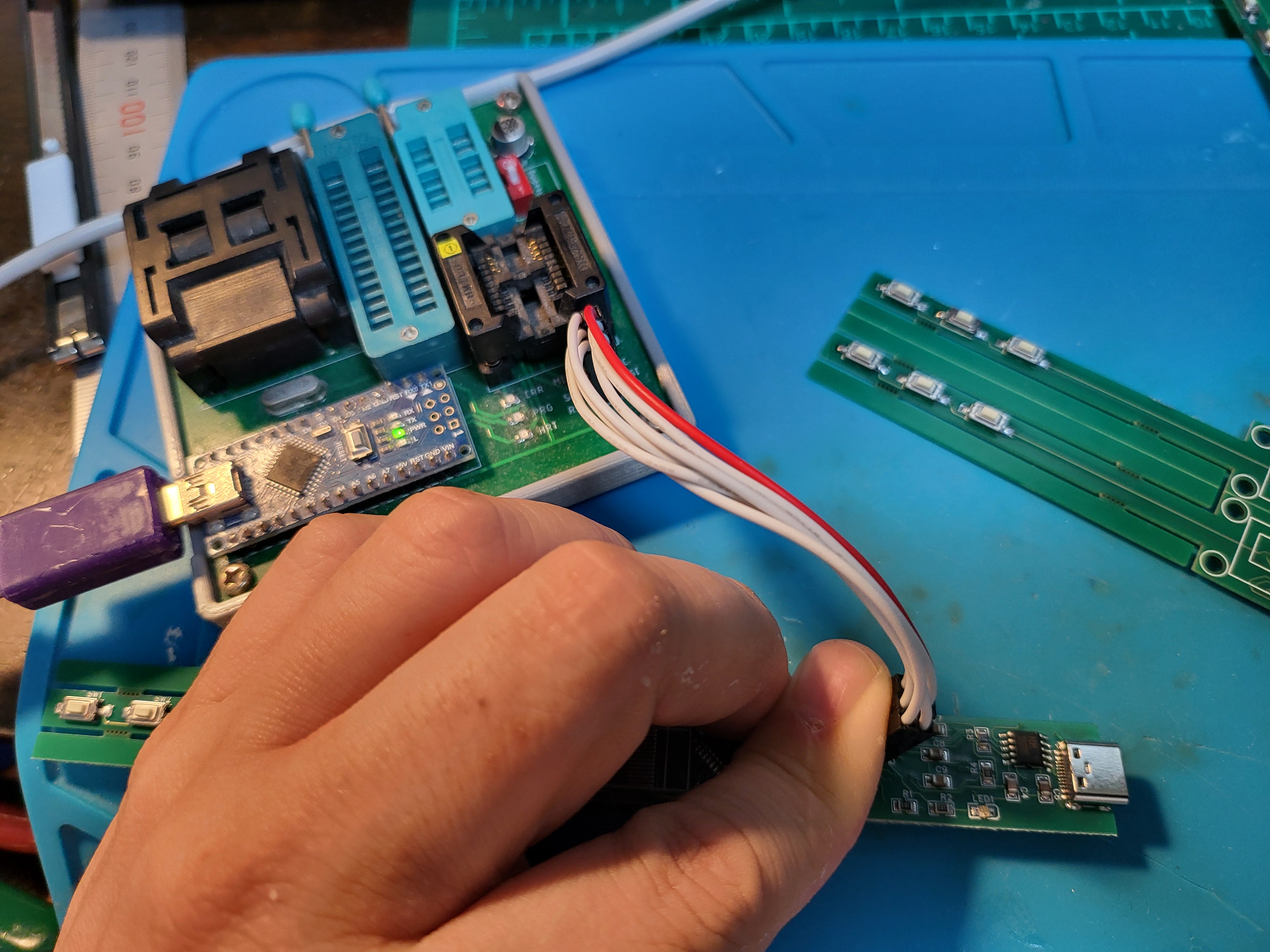
아두이노 부트로더를 올려줍니다.
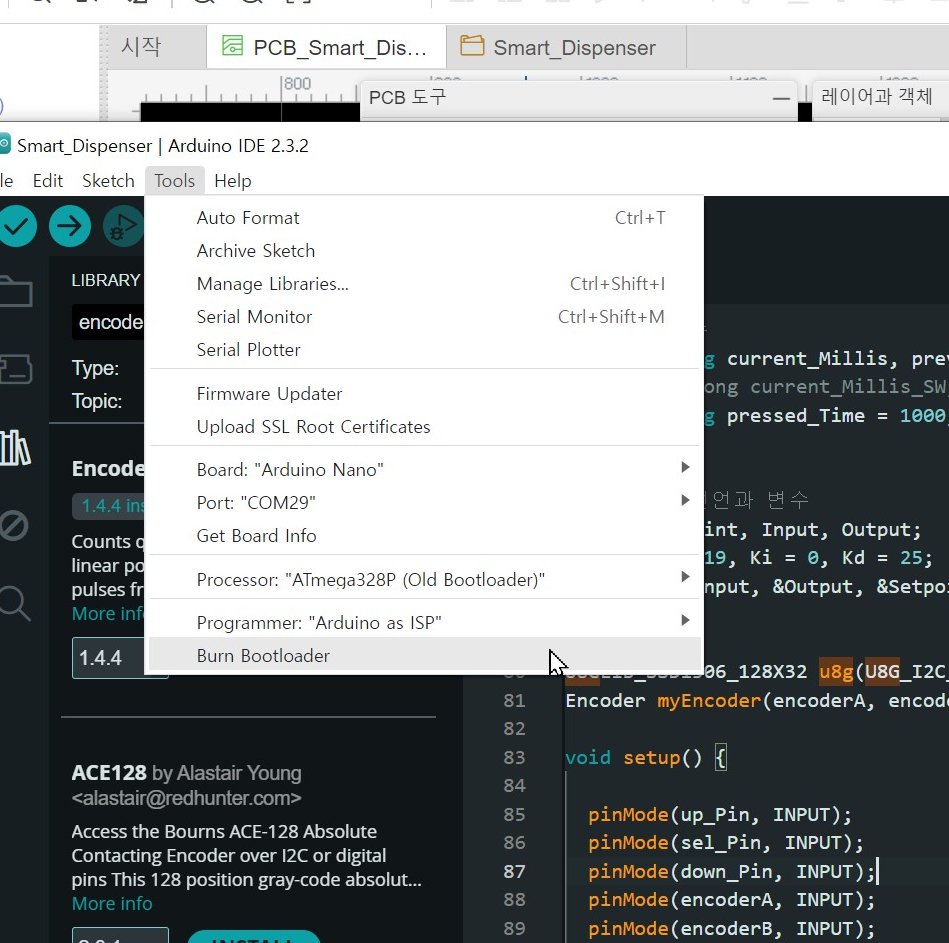
아두이노 나노를 베이스로 삼았기 때문에 위와 같이 세팅하고 부트로더를 올려주면 됩니다.
저는 아두이노에 arduino as isp 스케치를 올려 프로그래머로 사용하기에 [Programmer :"Arduino as ISP"] 를 선택했습니다.
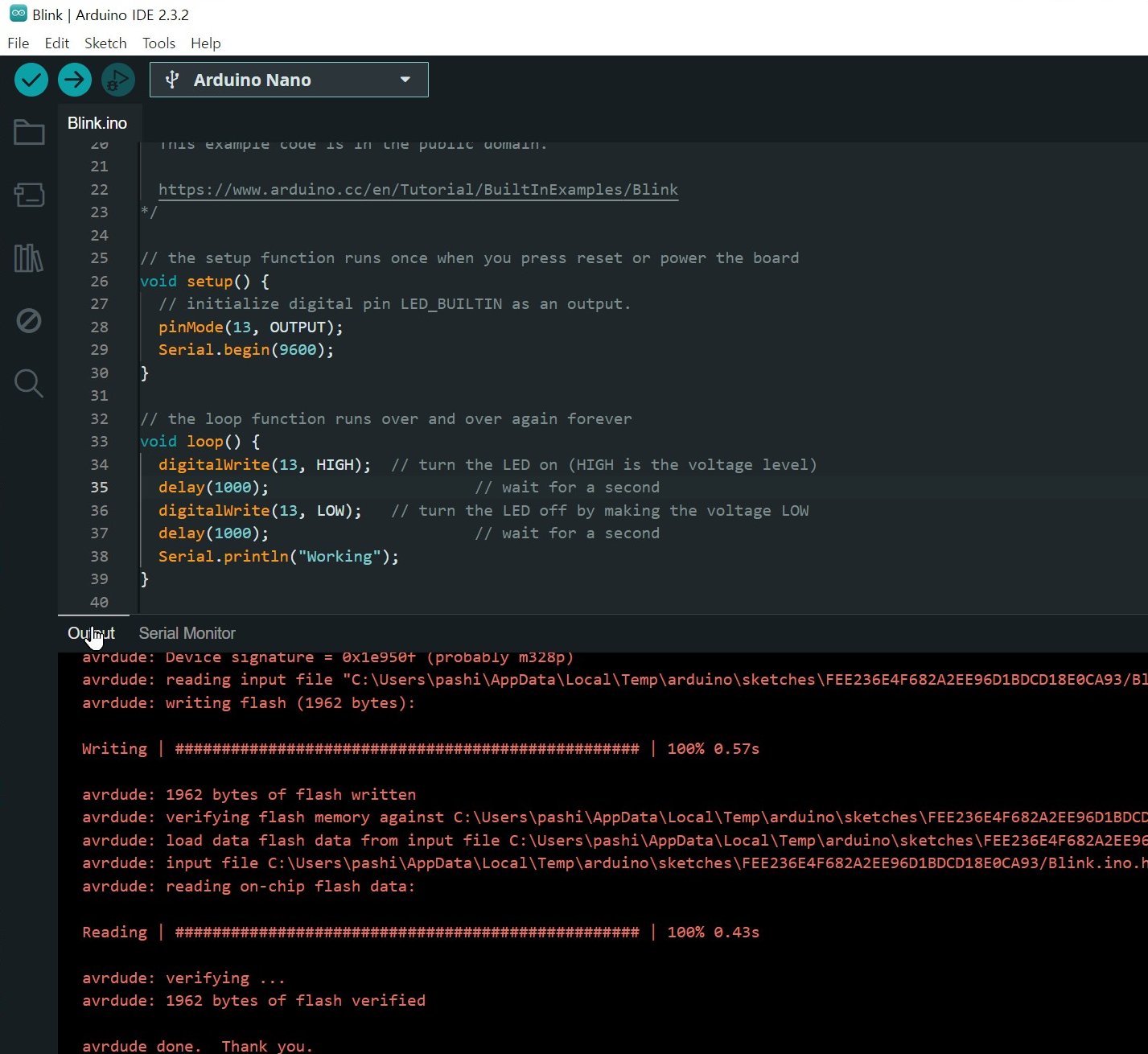
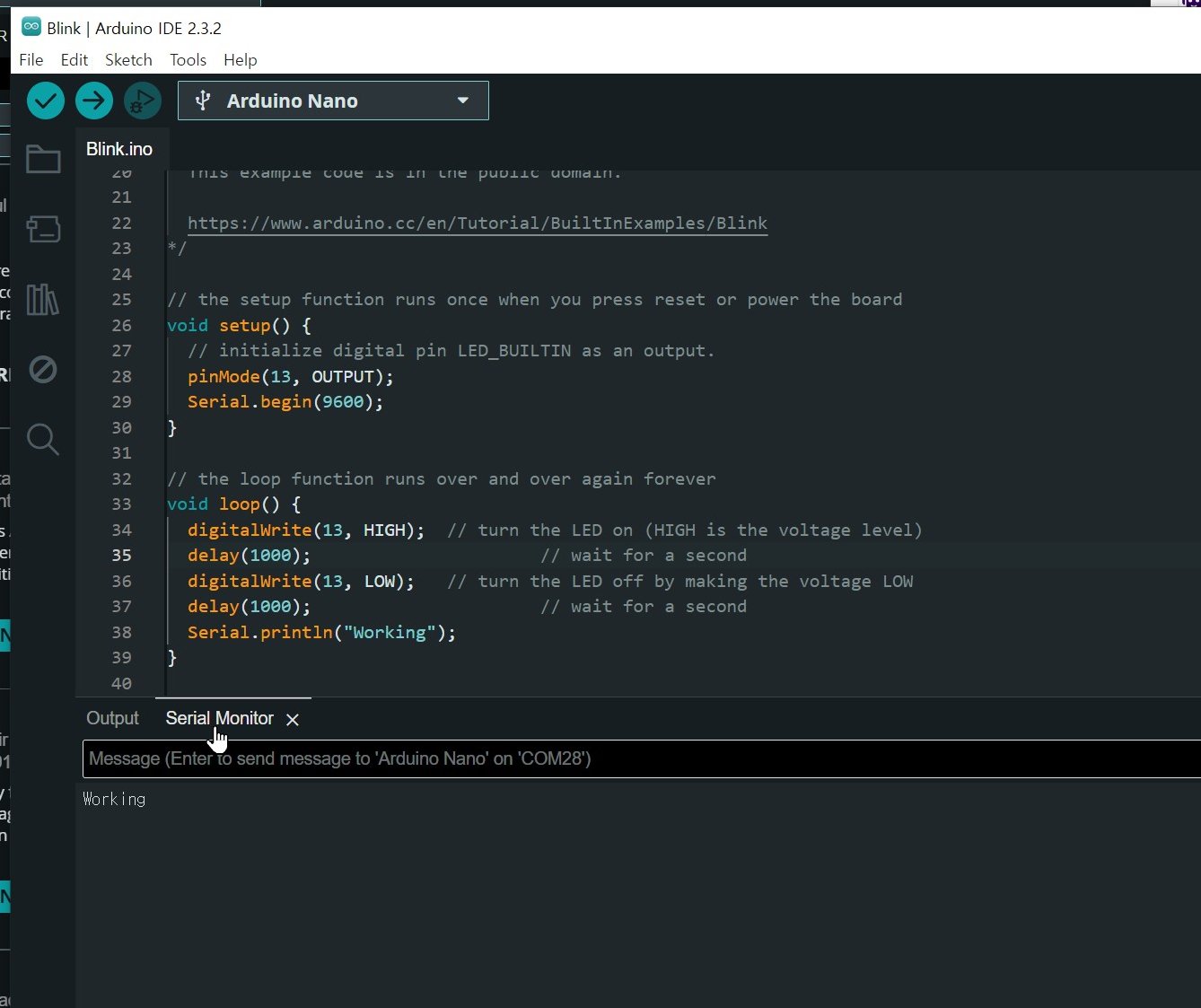
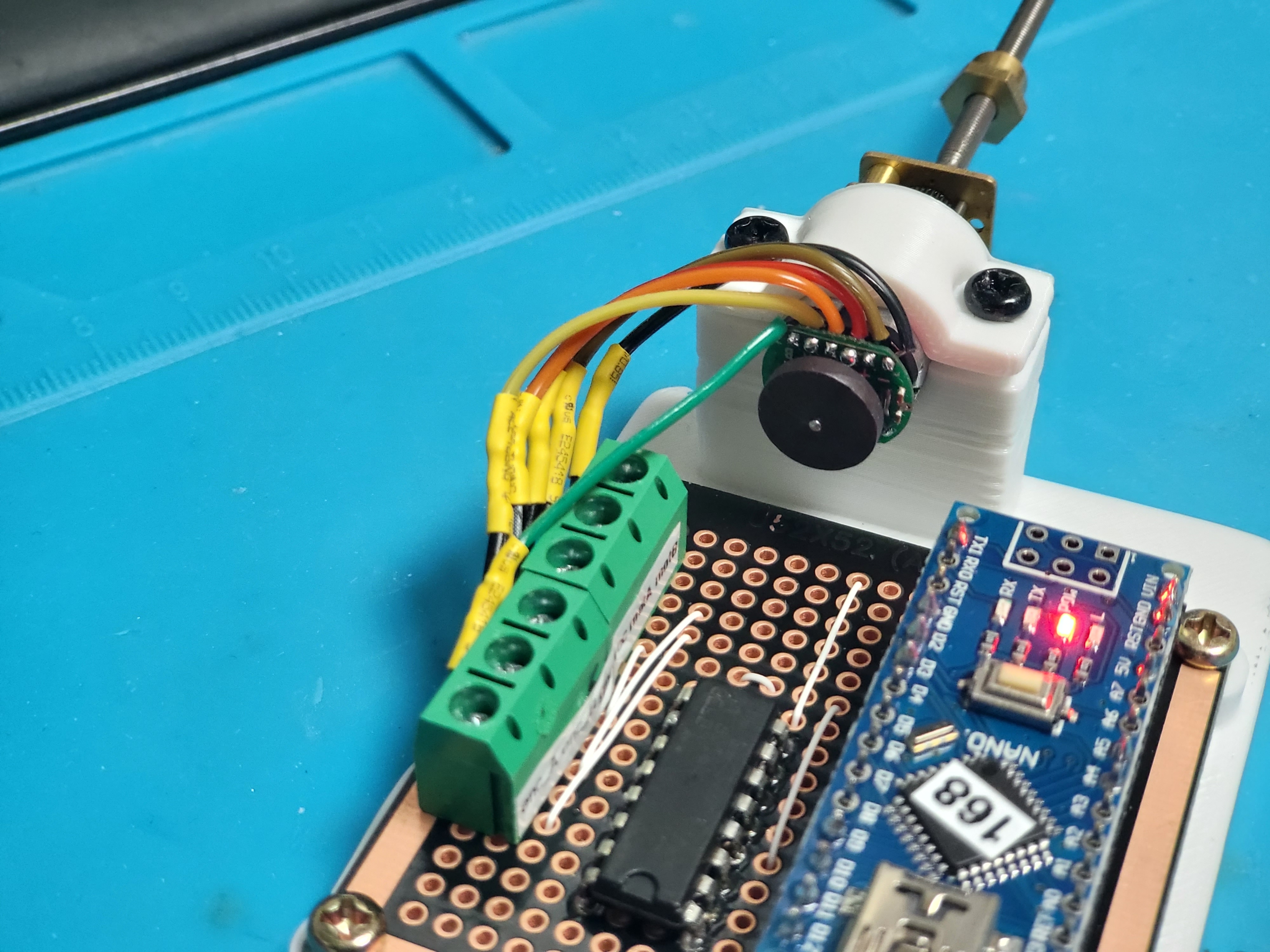
부트로더가 올라간 보드에 간단하게 blink 스케치를 약간 편집해 넣었습니다.
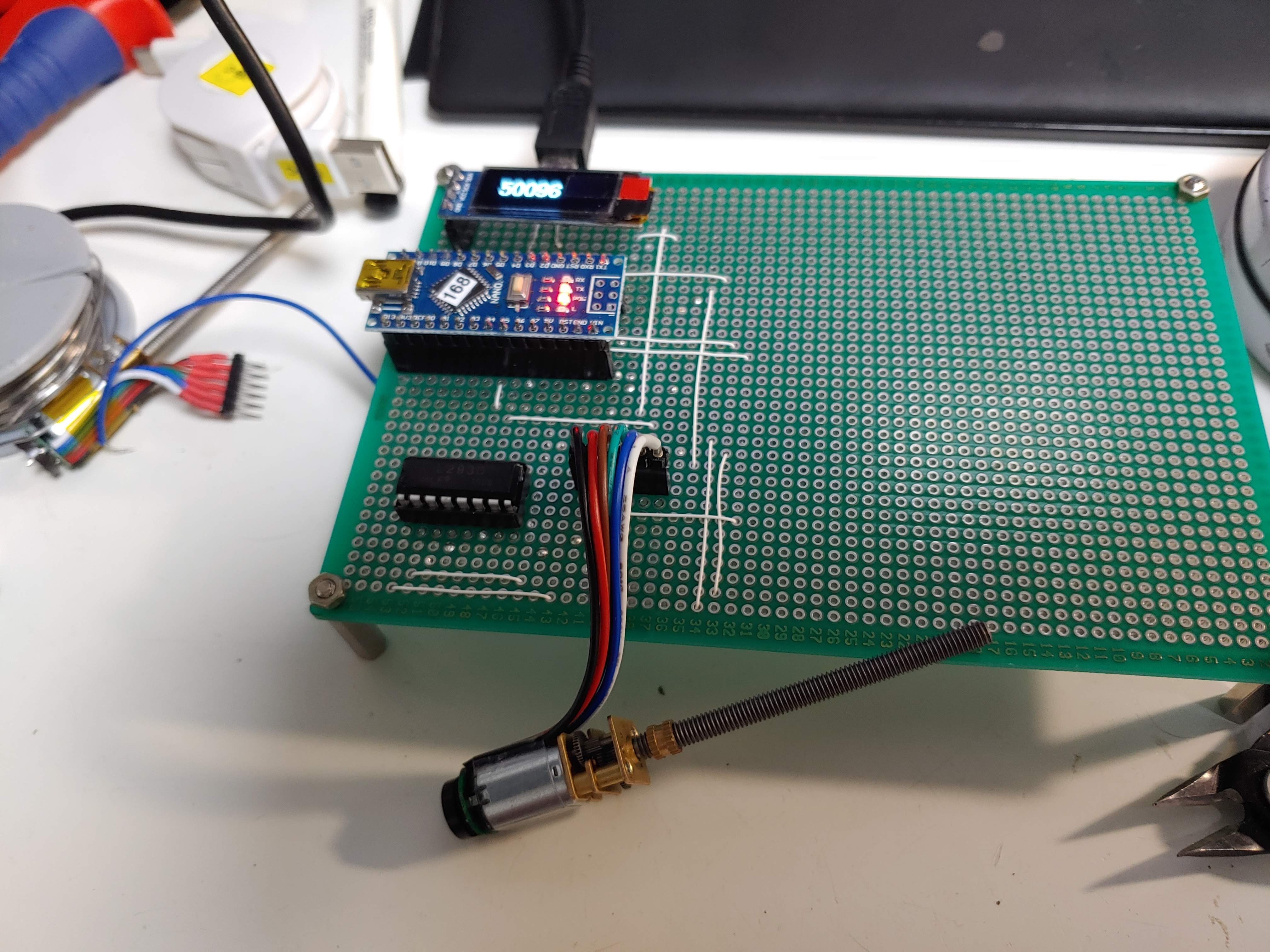
업로드해서 테스트해보면 잘 되는 것을 볼 수 있습니다.
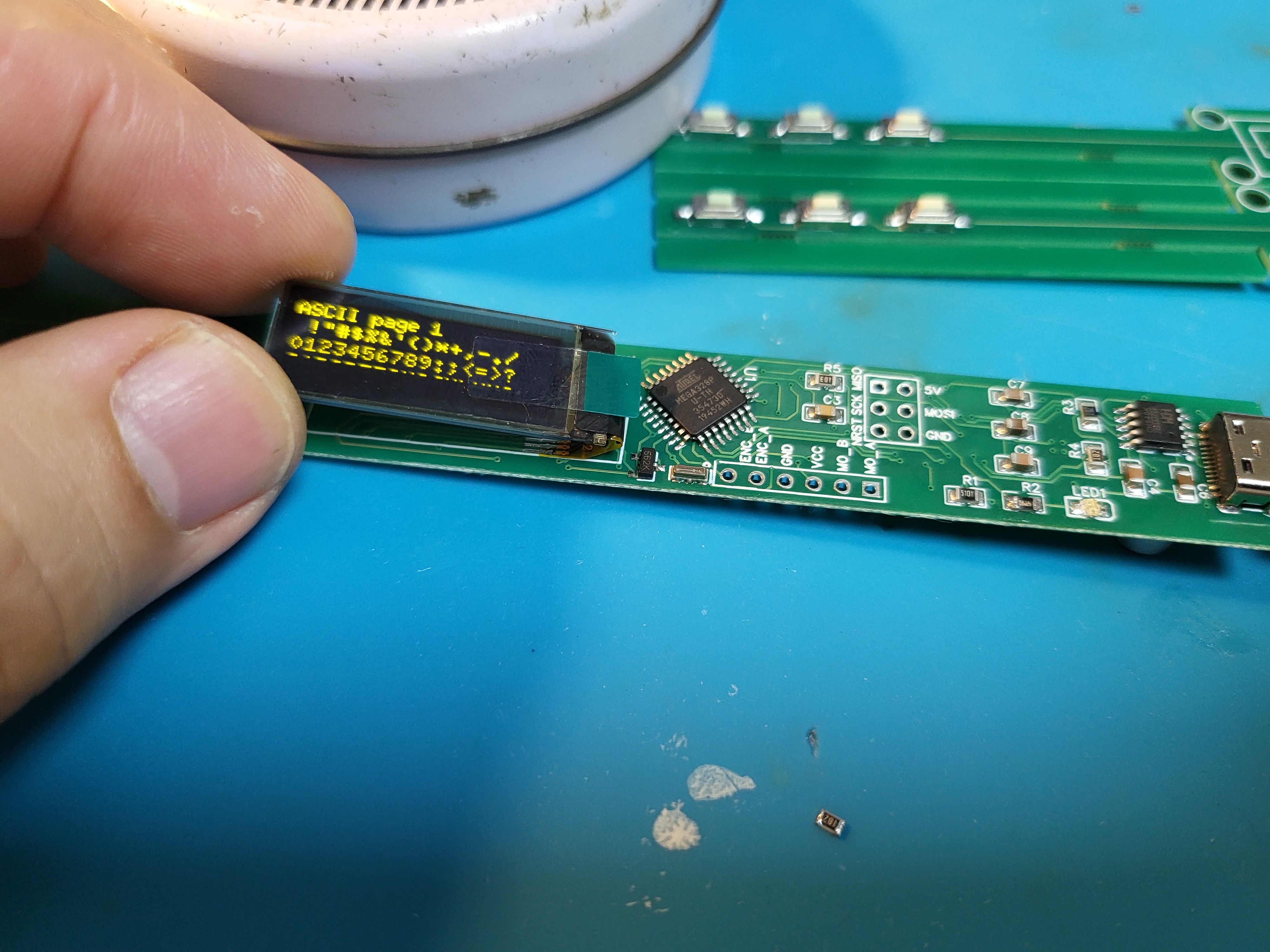
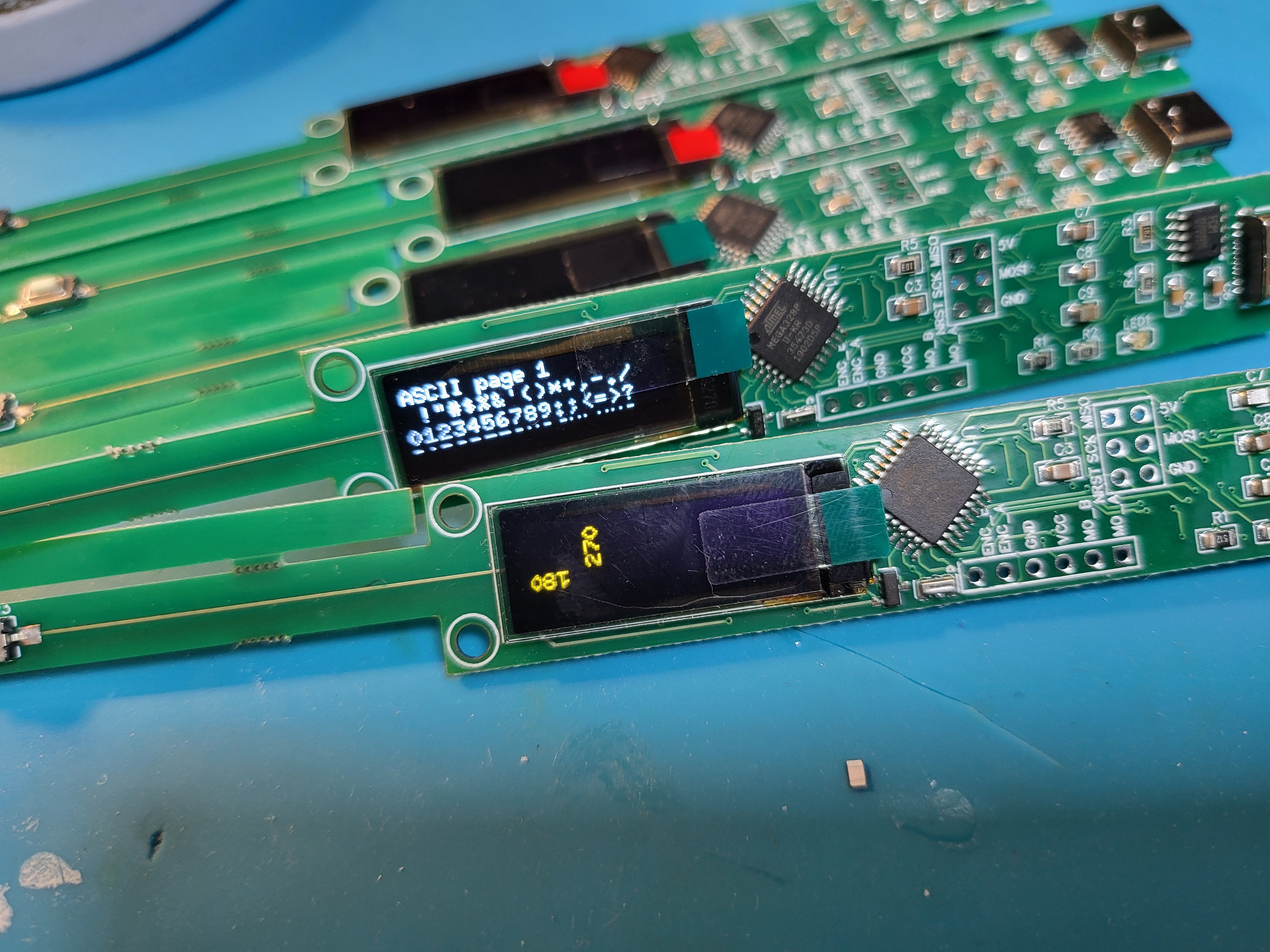
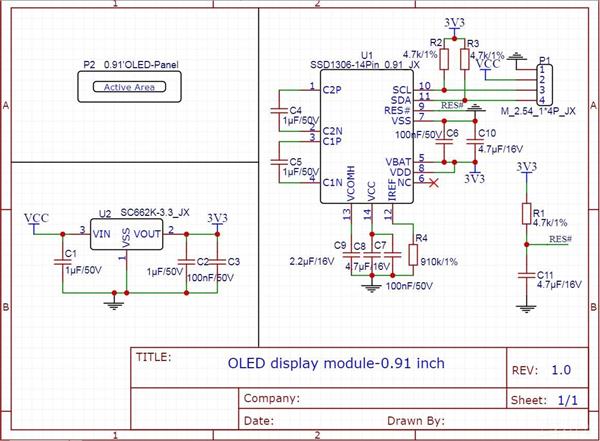
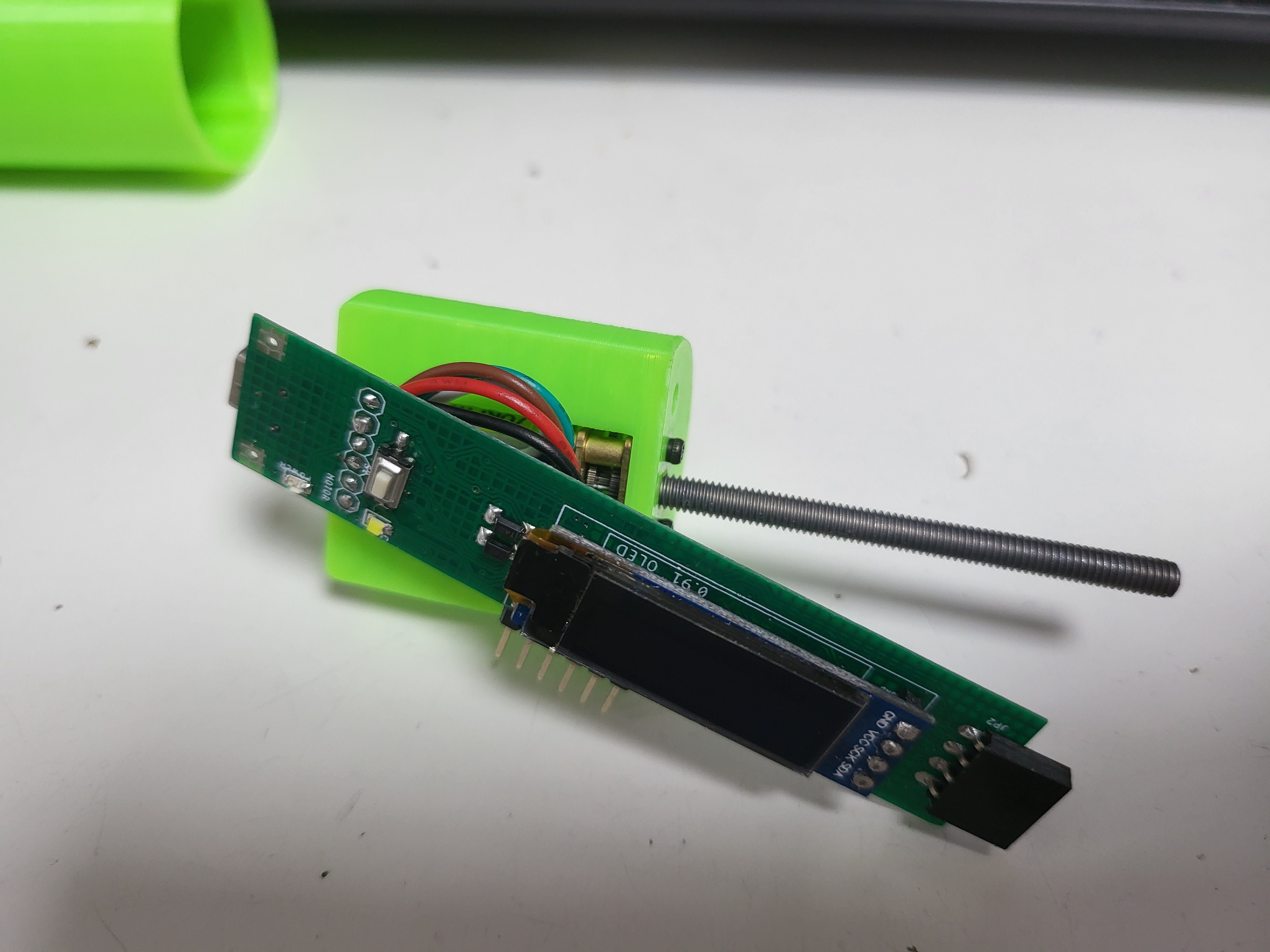
U8glib 예제를 넣어봤습니다. OLED도 잘 되는군요.
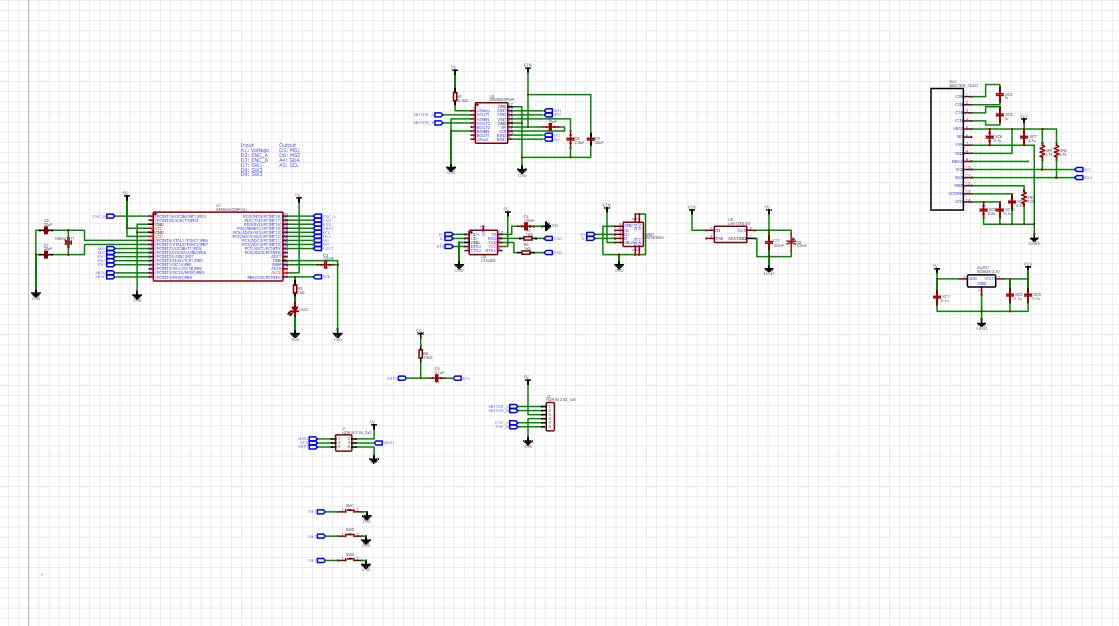
점검해 보니
1. USB 커넥터를 Bottom으로 보내야 겠고
2. Reset 스위치를 제거했더니 쓰기가 불편해서 다시 넣어야 할 것 같습니다.
3. OLED 위치도 약간 조정이 필요하네요.
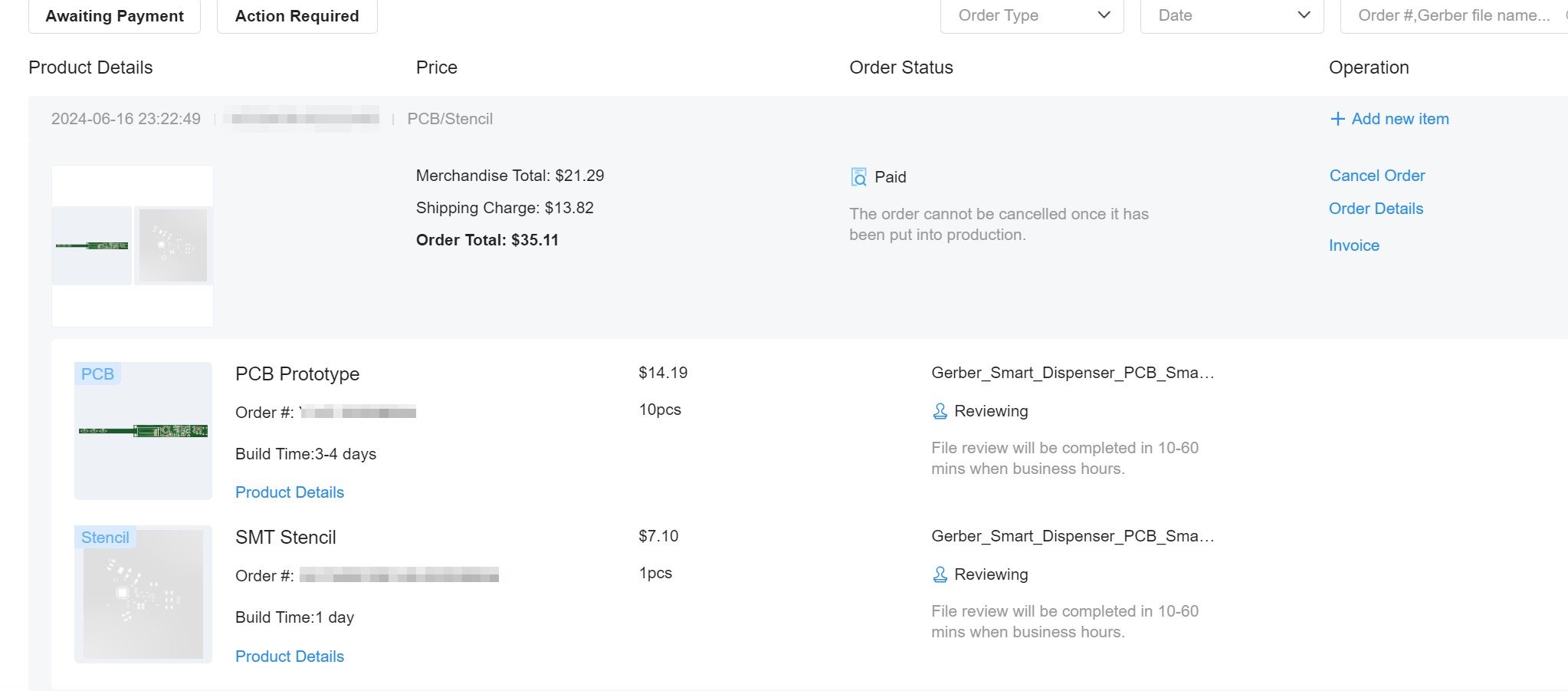
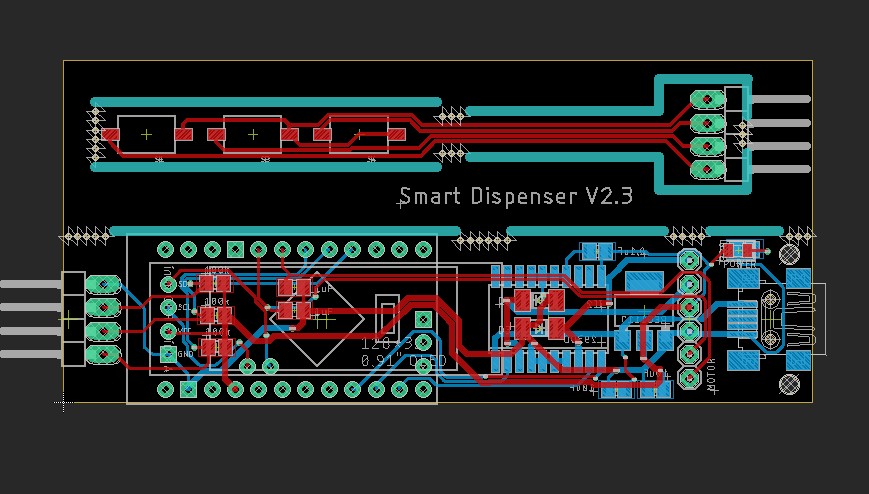
[진짜진짜_마지막_최종] 수정 버전의 PCB를 주문했습니다.
주문한 PCB가 올 때까지는 기존 보드를 사용하면서 스케치를 수정하려 합니다.
'Making > 스마트 디스펜서' 카테고리의 다른 글
| 스마트 디스펜서 #14 (0) | 2023.10.18 |
|---|---|
| 스마트 디스펜서 #12 - 기어비 측정공구 제작. (0) | 2022.10.01 |
| 스마트 디스펜서 #11 - 테스트. (0) | 2022.08.18 |
| 스마트 디스펜서 #10 - Re:Re:Re... (0) | 2022.07.04 |
| 스마트 디스펜서 #9 - 새 설계 출력 (0) | 2022.06.25 |