728x90

엔코더가 달린 모터를 사용하고 있으므로 위치의 정밀 제어를 할 수 있습니다.
모터는 기어드 DC 모터라서 모터가 정지할때 정위치에 정지하는게 아니라 관성회전하면서 멈추는 상황이죠.
이를 PID 제어로 정확하게 정위치에 멈추도록 제어할 수 있습니다.


하지만 게인값을 아무리 바꿔봐도 계속 왔다갔다 하면서 제어가 안되네요.
게인값을 수정하면 좀 변화라도 있어야 하는데 전혀 변화가 없는 느낌입니다.
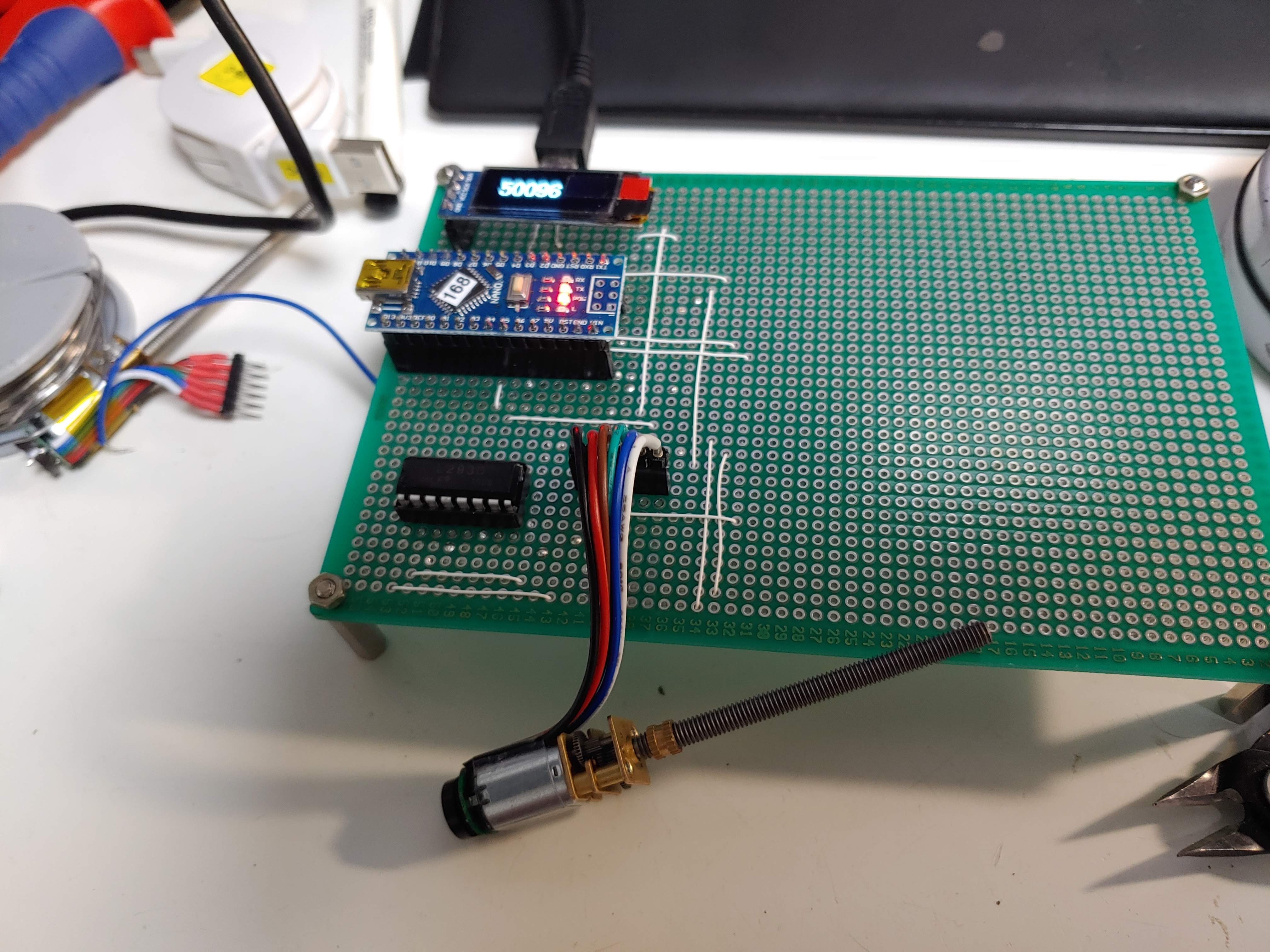
정/역회전을 반복하면 리셋되는 문제가 있어서 테스트보드를 다시 만들어서 테스트해보는 중입니다.
여러모로 확인해 본 결과 전원부와 모터 역기전력만 막아주면 괜찮을 듯 하네요.
그리고 PID 제어는 빼고 ON-OFF 로만 해도 문제 없을 것 같습니다.
주사기를 누르는 부하가 브레이크가 되는지라 오차값 이내에서 거의 정확하게 멈추네요.
오히려 PID 제어를 넣을 경우 목표값 근처에서 pwm 출력을 줄이므로
목표값에 다다를 때쯤 모터 제어가 급하게 변경되면서 제자리를 찾기가 힘들어지는 것 같습니다.


전체 구조가 너무 굵고 못생긴데다 손에 잡히는 느낌도 안 좋습니다.
구조를 변경하면서 하드웨어를 전부 재설계하기로 하고 새 PCB를 주문했습니다.
새 PCB가 오면 기구설계를 다시 진행하겠습니다.
728x90
'Making > 스마트 디스펜서' 카테고리의 다른 글
| 스마트 디스펜서 #9 - 새 설계 출력 (0) | 2022.06.25 |
|---|---|
| 스마트 디스펜서 #8 - 새 설계 (0) | 2022.06.21 |
| 스마트 디스펜서 #6 - 모터 변경과 감속비 계산 (0) | 2021.02.03 |
| 스마트 디스펜서 #5 - 조립과정 확인 (0) | 2021.02.02 |
| 스마트 디스펜서 #4 - PCB 도착 - 조립과 테스트 (0) | 2021.01.29 |