728x90


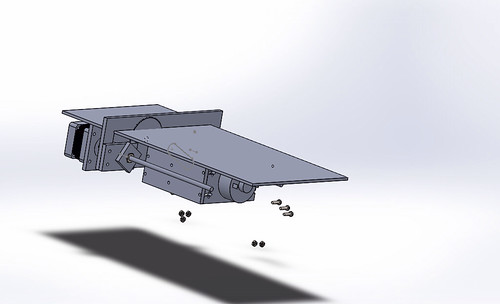
키트화에 대한 문의가 들어와서 간편성을 위해 전체 볼트 조립 방식이었던 것을 수정했습니다.
스핀들과 외각 케이스 부분이 각각 한덩어리로 접착되고, 두 모듈을 볼트로 고정하도록 해봤습니다.
스텝 모터부는 위에서 끼워 넣은 후 볼트로 고정됩니다.

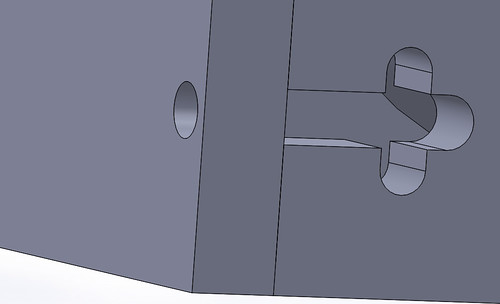
포맥스나 아크릴 모두 사용 가능하지만 업체에 맡겨서 가공할 경우 공차 때문에 조립이 안될 수 있는데
아크릴은 직접 수정하기 힘든 편이라 아예 가공여유를 뒀습니다.
아마 다음번엔 리밋 스위치 장착하는 부분에 대한 수정이 있을 거 같습니다.
728x90
'[완료]Arduino Projects > Mini Table Saw' 카테고리의 다른 글
| 미니 테이블 소 - 아두이노 프로그래밍 #2 (4) | 2015.06.14 |
|---|---|
| 미니 테이블 소 - 아두이노 프로그래밍. (0) | 2015.06.11 |
| 미니 테이블 소에 대한 잡담. (0) | 2014.08.16 |
| 미니 테이블 소 조립 설명서 #4 - 전장부 참고 자료. (0) | 2014.08.14 |
| 미니 테이블 소 조립 설명서 #3 - 몸체 조립 (0) | 2014.08.14 |



 Mini Table Saw.zip
Mini Table Saw.zip